
Microwire总线
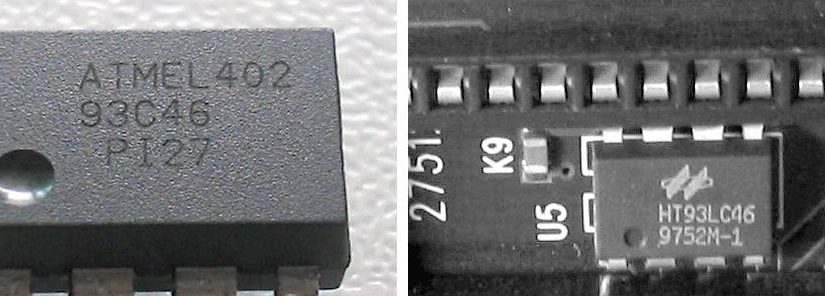
Microwire总线是美国国家半导体公司研发的一种简单的串行通讯接口协议,该总线是采用三线进行数据传输。Microwire总线和SPI总线一样数据输入输出分别使用一根引线,同样可以提供同步数据传输方式,可以适用在多种微控制器、EEPROM或ADC等场合。常用EEPROM的93系列芯片就是采用该总线的芯片,采用COMS技术,体积小巧,和24、25系列芯片一样也是一种理想的低功耗非易失性存储器。常见的93系列EEPROM存储器容量从256位到16K位。93芯片广泛使用在各种家电、通讯、交通或工业设备中,通常是用于保存设备或个人的相关设置数据。如最常见到网卡上的93芯片就是用于保存网卡的MAC物理地址、供应商名称以及相关配置。生产93系列芯片的公司也有很多。如ATMEL公司生产的93C46芯片是该公司生产的93系列芯片的一种,它有1K位的存储空间,93系列有二种数据输入输出模式,分别为8位和16位数据模式,1K位的存储位就可以分为128×8和64×16,它的电压范围是2.7V到5.5V和1.8V到5.5V,可以适应低电压的应用,在5V的电压下最高时钟频率可以达到2M,芯片可以进行一百万次的擦写,数据可以保存一百年。图一是93C46的PID封装和用于网卡的93LC46芯片。
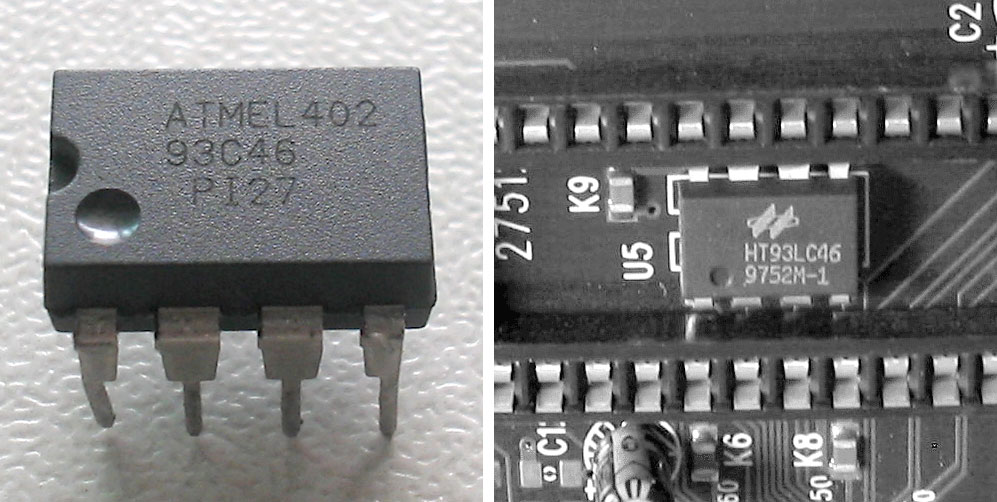
图一
图二
图二是ATMEL公司的93C46的PID封装引脚图。CS引脚为片选引脚,高电平为有效,用于同一总线上不同芯片的选择。在执行每一个指令之前先要把CS拉高,指令完成后把CS拉低使芯片进入复位休眠状态,CS为低时,芯片保持复位状态。在连续操作多个指令时,指令与指令间,CS必须要有不小于一个TCS时间的低电平保持,使芯片复位。ATMEL公司的93C46芯片工作电压2.7V-5.5V的型号TCS不能小于250ns,工作电压1.8V-5.5V的型号TCS不能小于1000ns。SK是串行时钟输入引脚。DI是串行数据输入引脚,接收微控制器传向芯片的数据、地址和命令数据。DO是串行数据输出引脚。ORG引脚是内部数据结构选择输入引脚,该脚为高电平时数据结构为×16,低电平时数据结构为×8,DC是空脚。
图三
图三是93C46芯片的MicroWire总线时序图。在编写驱动程序前,先要分析一下这个时序图。从图中可以看到,在CS被拉高至少tCSS时间(CS初始时间)后,才能开始在SK上传送时钟信号,时钟的正半周和负半周时间不能小于tSKH和tSKL。最后一个时钟的正半周发送完后CS仍要保持tCSH时间(CS保持时间)后才可以拉低CS,tCSH的最小值可为0。指令输入时数据在SK的负半周低电平时开始设置,图中的tDIS(DI设置时间),在SK的高电平时至少保持tDIH时间(DI保持时间)。在图中第四条时序线图中则可以看到在芯片读操作时DO输入1或0时的时序,可以看出在SK上升沿开始后tPD0或tPD1时,DO才输出数据,在编写驱动时就要注意读DO时可在SK拉高好延时tPD0(tPD1)后才读取DO的值,否则会造成误读。第五条时序线图则时指芯片编程时在CS上升沿开始tSV时间后DO输出状态值,tDF是指CS下降沿开始到tDF时间后才进入高阻态。因为不同的芯片型号、工作电压和工作频率这么参数值都会有所不同,93C46的具体参数可以参看光盘中的芯片资料。
93C46有7个操作指令,微处理器就是靠发送这几个指令来实现芯片的读写等功能。表一是93C46的指令表。在93C的其它型号中指令基本是一样,所不同的是地址位的长度,在使用时要查看相关芯片资料,得知地址位长度后再编写驱动程序。因为93C的数据结构有两种,所以地址位和数据位会有x8\x16两种模式,这在编程时也是要注意的。在ERASE、WRITE、ERAL、WRAL指令之前必须先发送EWEN指令,使芯片进入编程状态,在编程结束后发EWDS指令结束编程状态。
| 指令 | 起始位 | 命令代码 | 地址位 | 数据位 | 说明 | ||
| x8 | x16 | x8 | x16 | ||||
| READ | 1 | 10 | A6-A0 | A5-A0 | 读取指定地址数据 | ||
| EWEN | 1 | 00 | 11xxxxx | 11xxxx | 擦写使能 | ||
| ERASE | 1 | 11 | A6-A0 | A5-A0 | 擦除指定地址数据 | ||
| WRITE | 1 | 01 | A6-A0 | A5-A0 | D7-D0 | D15-D0 | 把数据写到指定地址 |
| ERAL | 1 | 00 | 10xxxxx | 10xxxx | 擦除所有数据,只在Vcc为4.5V-5.5V有效 | ||
| WRAL | 1 | 00 | 01xxxxx | 01xxxx | D7-D0 | D15-D0 | 写指定数据到所有地址,只在Vcc为4.5V-5.5V有效 |
| EWDS | 1 | 00 | 00xxxxx | 00xxxx | 擦写禁止 | ||
表一
READ(读数据)
所有的指令的第一位为START(起始位),芯片确认起始位的条件是:CS和DI为高电平时,SK的第一个脉冲高电平时DI仍为高电平。微控制器发送完起始位后就可以输入7种指令所需的命令代码、地址码和数据来完成指令操作。READ指令在发送完地址码AN-A0后(地址码位数位要根据型号和所选用的数据结构来确定),DO从高阻态变为低电平,在随后的一个SK脉冲后在DO输出DN-DO的数据(数据位数由所选用的数据结构来确定),微控制器在这时读取DO取得数据,读取完数据后拉低CS结束指令。

图四
EWEN(擦写使能)
芯片上电后就进入EWDS擦写禁止状态,这时要进行擦写指令,微控制器必须先要发送EWEN指令,使能芯片进入允许擦写的状态,否则操作任何擦写指令都是无效的。在完成擦写操作后发送EWDS指令,使芯片进入禁止擦写的状态,这样可以防止因干扰或其它原因造成的数据错误。要注意的是:在第一个EWEN指令后芯片一直保持在擦写允许状态,直到使用EWDS或开断电源,芯片才会重新进入擦写禁止状态。
图五
EWDS(编程禁止)
图六
WRITE(写入数据)
WRITE指令在发送完数据位后,CS至少拉低tCS时间再拉高,这时DO会从高阻态变为低电平来指示芯片正在进行编程,微控制器应在这时检测DO,当DO再次拉高时芯片编程完成芯片进行就绪状态,这时才可以进行下一个指令。芯片编程所需的时间为tWP,这个时间最大为10MS,所以微控制器在对芯片编程时最好用一个循环检测DO,当检测到高电平时,说明写入过程结束,应该退出循环体。如果循环体循环10MS后仍然没有检测到高电平时,说明有故障引起操作超时,这时要退出循环体,以免进入死循环。这样的代码在前面文章的例子中也是有使用的。WRAL指令和WRITE指令对写入过程的处理方式是一样的,不一样的是WRAL是把数据写入到所有地址中,时间会长点,而且要求电源在4.5-5.5V。
图七
WRAL(全部写入)
图八
ERASE(擦除数据)
ERASE指令可以说是另一种形式的写入指令,所不同的是它不用发送数据,它会把指定地址的所有数据位都置‘1’,也就是相当于用WRITE写入‘FF’。而ERAL指令就是相当于用WRAL写入‘FF’,同样ERAL也需要工作在4.5-5.5V电源下。
图九
ERAL(擦除所有数据)
图十
在这里笔者把上一篇文章的电路更改了一下,使它不但能完成本篇的实验外,还能配合笔者编写的上位机程序,成为一个简单实用的串行EEPROM读写器,它不单单可以支持93C系列的芯片,同时也可以支持24C、25系列等多种芯片。图中的芯片插座IC2的1到7脚连接取AT89C2051的P1.1至P1.7,因为P1.2-P1.7内部是有上位的,所以可以不用在外部加上拉电阻,而P1.0/P1.1是需要外部上拉的,所以在P1.1上加R7进行上拉。如不加这个电阻的话93C46的读写实验就无法成功了。J1使用DB9的孔式接头,连接电脑时可以使用一根串口延长线。图12是笔者用万用电路板制作的实验电路,这个电路最大的特点就制作简单、体积小巧、无需外接电源,使用到单片机使其性能稳定,而且可以进行程序的修改使其增加更多的芯片支持。图十二是笔者用万用板制作的实验电路。
 图十一
图十一
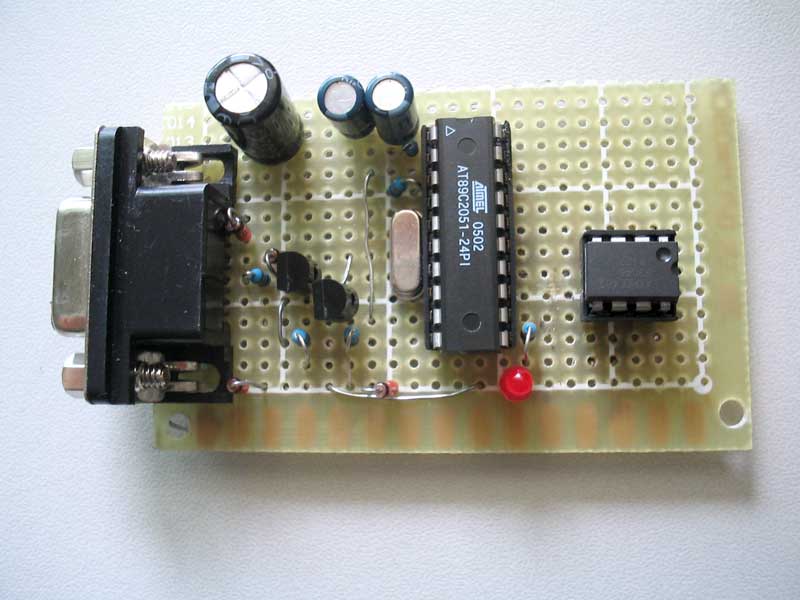
图十二
对93C46的串口通讯实验方法和上一篇文章的方法是一样的,这里不再多做介绍了,只是93C46多了一个擦除命令的实验,命令代码是02 00 00 00,发送这个代码后擦除成功后就返回00,不成功返回01。要注意的是擦除命令只在VCC在4.5-5.5V有效。
作者编写的上位机程序软件界面如图十三,使用此程序就可以用这个电路读写24C、93C、25系列的串行EEPROM芯片。首先要把EEPROM.hex文件烧写到AT89C2051中,连接PC串口就可以使用EEPROM.exe软件进行读写了。
示例程序以及烧写器的HEX和上位程序下载 -》hex
图十三