继电器振荡电路,是早期利用电磁铁吸合关断来实现振荡循环的电路。电源通过继电器常闭触点连接到线圈上,上电后电容充电,到达阀值时,LED亮,然后线圈吸合,常闭触点断开,电容放电,LED灭,线圈断开,电路重新得电,循环反复。示波器表笔分别夹在线圈两端。
B站观看
分类:电子制作
电路分析13-焦耳小偷
“焦耳小偷”(Joule Thief)是一个简单而有趣的电路。在1999年11月出版的《Everyday Practical Electronics》杂志上,英国人Z. Kaparnik发表的《One Volt LED – A Bright Light》文章中介绍了仅用一颗1.5V电池点亮LED的电路,此后这个电路得到众多电子爱好者的喜欢,再后来由油管UP主bigclivedotcom在2002年8月首次使用了Joule Thief(焦耳小偷)这个昵称来命名这种电路。
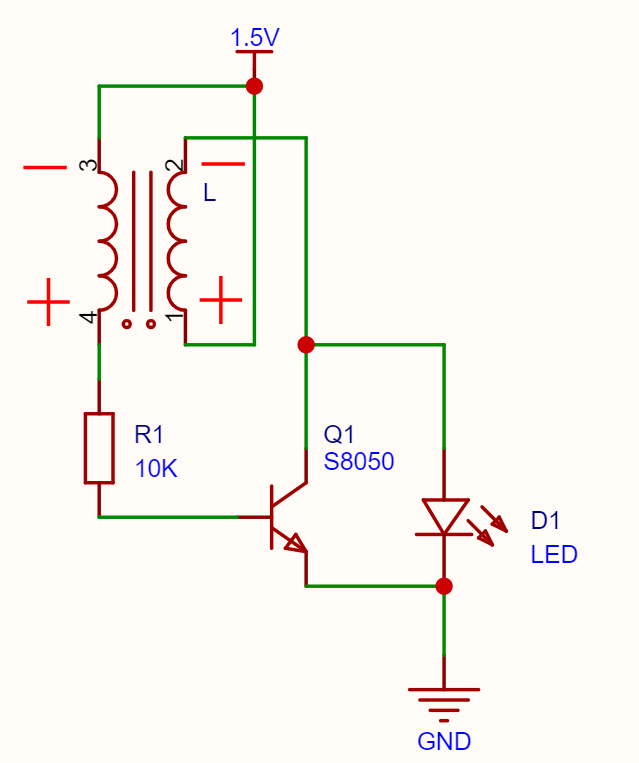
先来看看典型的焦耳小偷电路图。
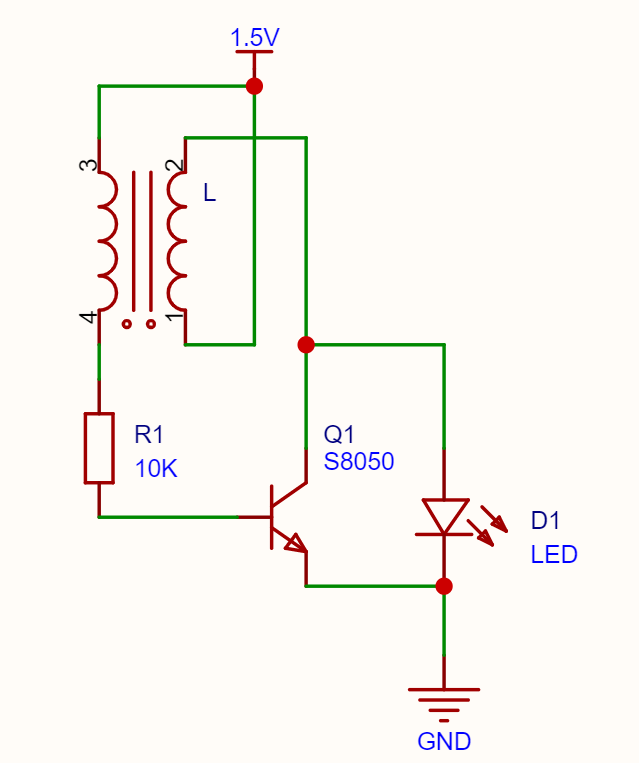
此电路可以让电压远低于LED压降的旧电池点亮LED,它可以榨干电池的能量,即使电压低至0.6V依然可以工作,所以是名副其实的“焦耳小偷”。 一节干电池电压最高也只有1.5V左右,是无法驱动压降为1.8-3.2V的LED,“焦耳小偷”其实是一种阻塞振荡器电路,通过变压器和晶体管的自振荡把电压升高从而点亮LED。其原理最早可以追溯到电子管时代1930年的一份美国专利1949383。
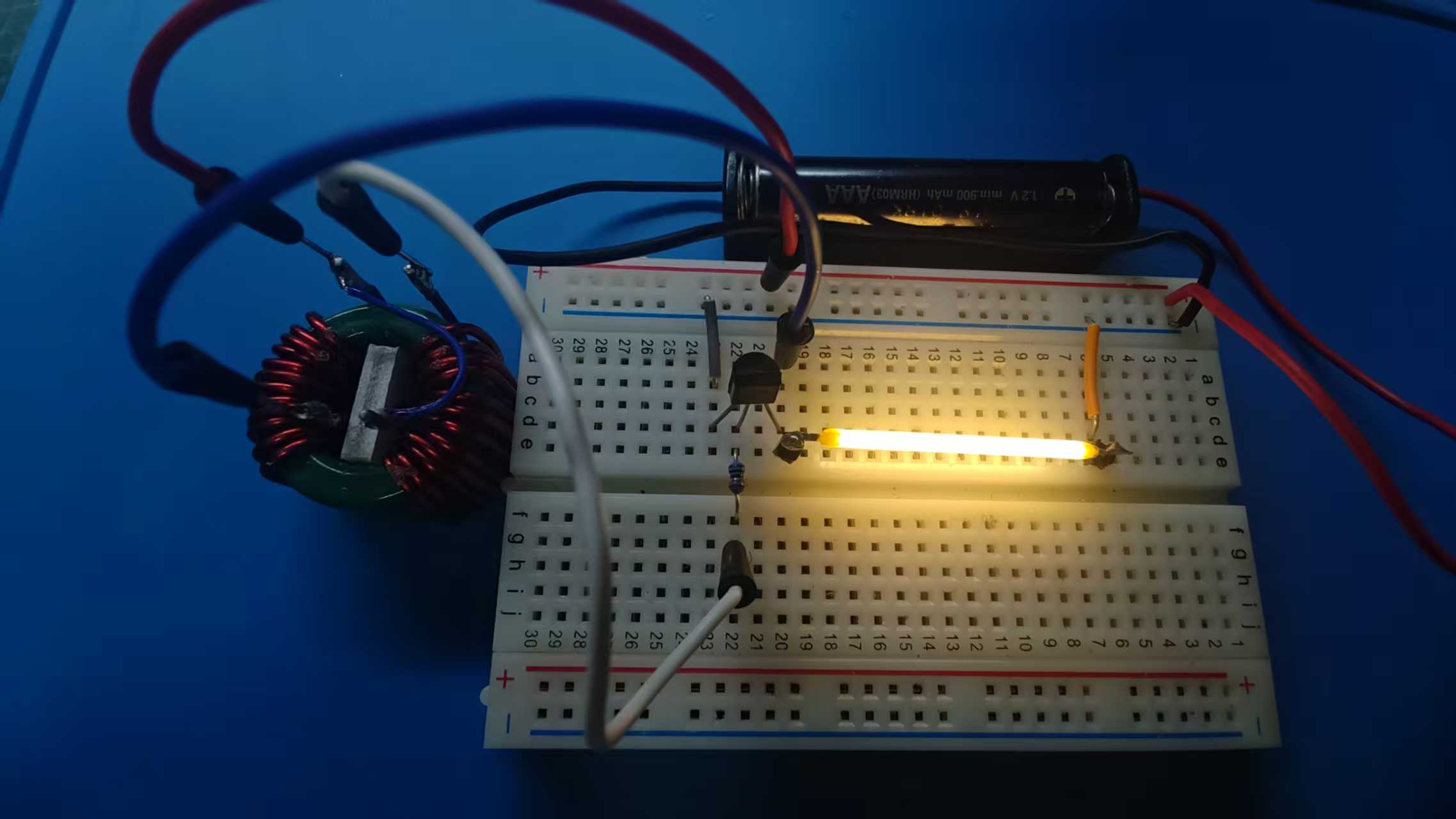
搭建实验电路
使用一个电源滤波器里的共模电感,一个NPN管S8050,一个压降为2.5V的LED,一个10K电阻,电池使用的是1.2V的Ni-MH可充电电池,连接好电路后LED成功点亮。
测量波形
由于使用的共模电感电感量比较大,测得电路所产生的振荡波形频率约为11.8KHz。示波器黄色线为基极电压,蓝色线为C极电压。
开始分析
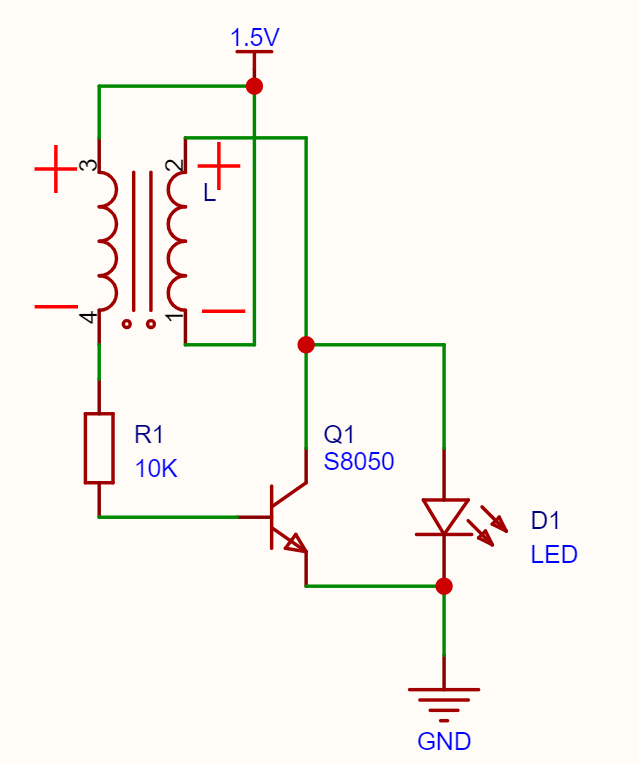
电源接通后,三极管B极电压上升到约0.6V时,波形图A点,三极管开始导通,此时C级上的电感12有电流通过。因电感12上有电流通过,电感12因此产生一个反向的电动势阻碍电流的流过,同时因为C极电流要远大于B极电流,电感 12产生的互感电动势要远大于电感34的自感电动势,会在电感34同名端产生方向一样的电动势,所以此时电感两侧的电动势状况如下图。
电感34上产生的互感电动势方向是流向B极的,形成正反馈,B级电流增加,从而C极电流也增加,这样反复反馈就会让三极管迅速导通。此时来到波形图的B点。在这个区间C极电流在不断增长,直到电流大到让线圈12或三极管饱和,一旦其中一个达到饱和时,电流达到最大,电流不再变化增加,此时线圈12的反向电动势消失,同时在线圈34产生的互感电动势也会消失。因为线圈34上的互感电动势的消失,B极的电流变小,C极电流也会因此减小,这时线圈12会产生反向电动势来阻止电流减小,电感会形成下图的状态。线圈34由此产生的互感电动势会让B极电压变小最后变成负电压,进入波形图中的C区域。三极管此时会迅速截止。这时线圈34所产生的自感电动势最大,电压叠加到电源电压上,LED上的电压会大于2.5V,LED点亮。
随着LED的点亮,线圈12的能量得到释放,B极电压会回到循环开始的状态,这样振荡就一直继续下去。
20260519
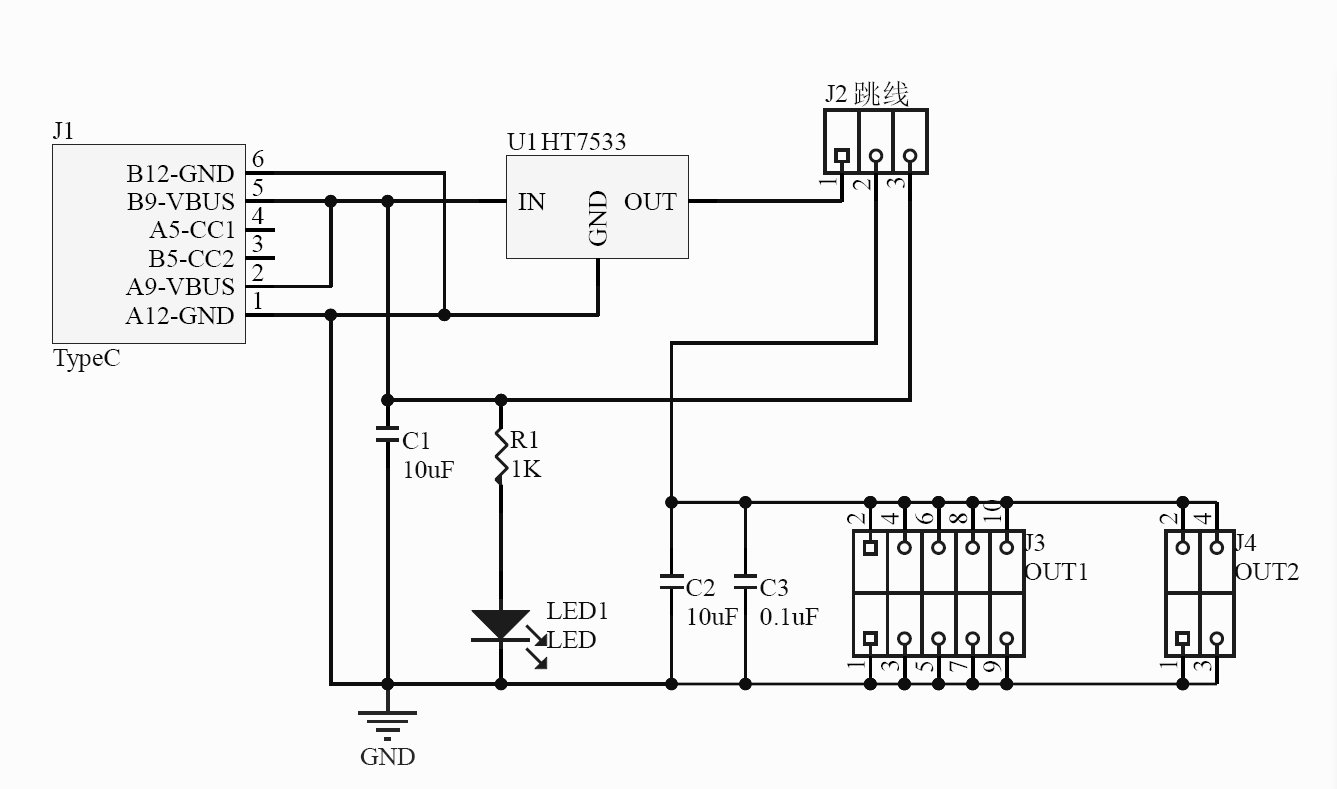
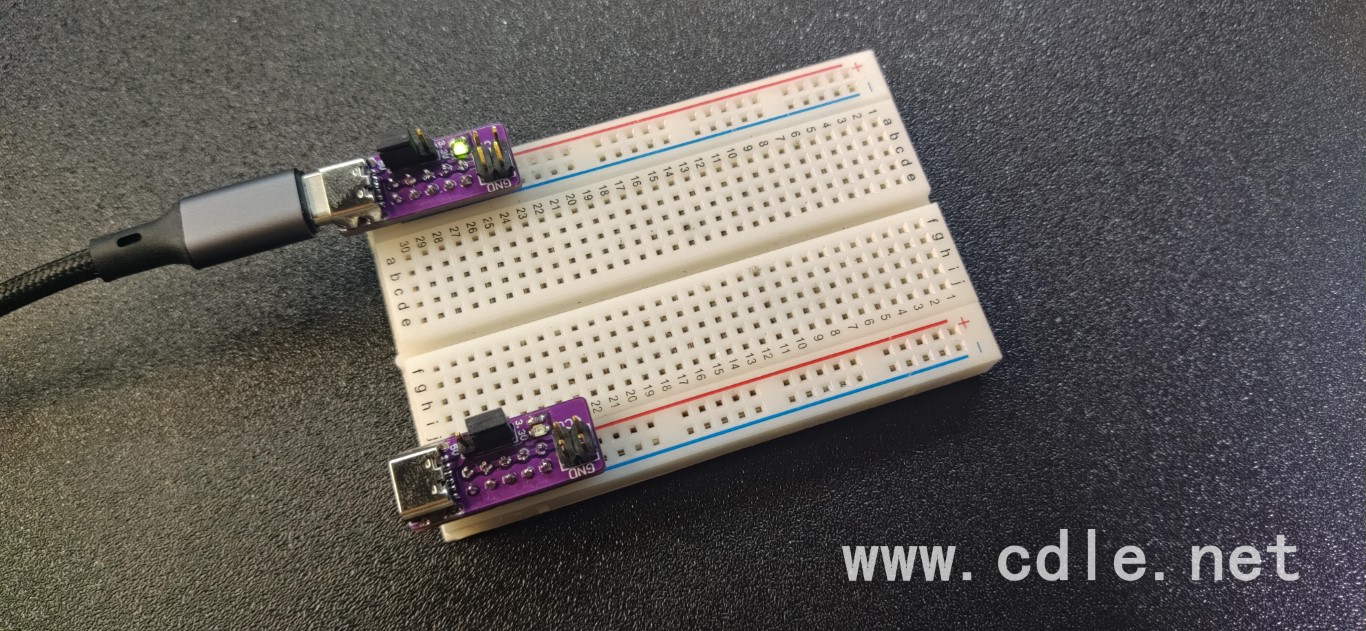
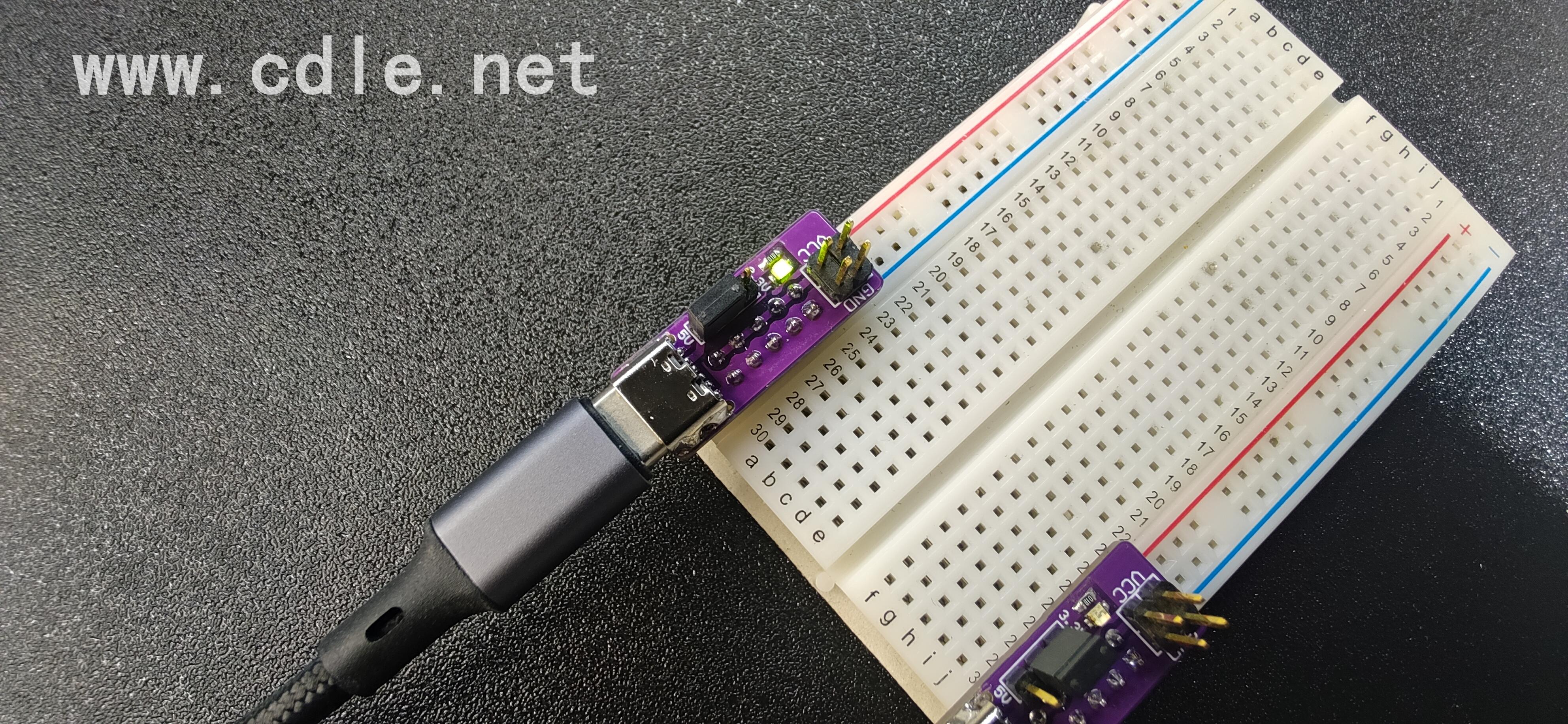
DIY面包板TypeC电源模块