

关于LED的基本公式和各种颜色不同压降的图表。
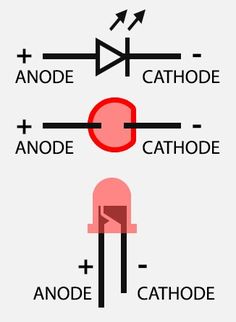
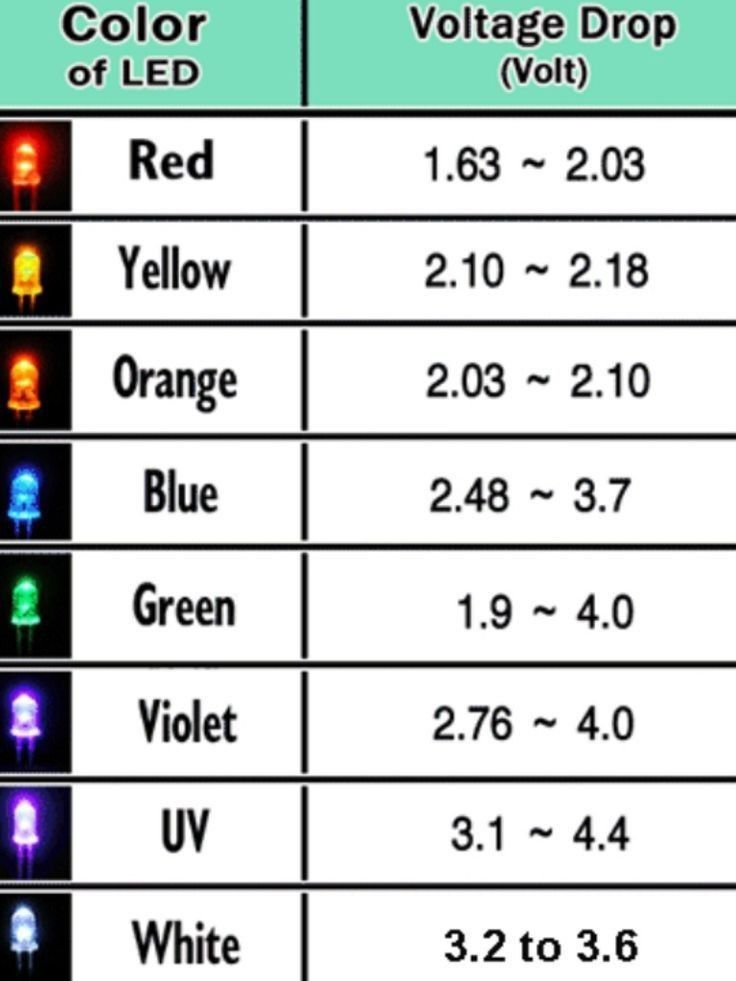
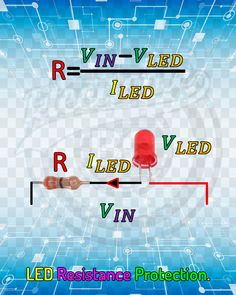
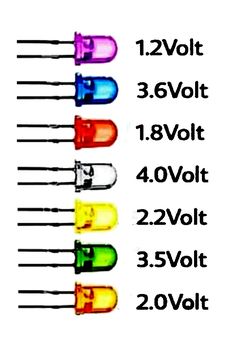
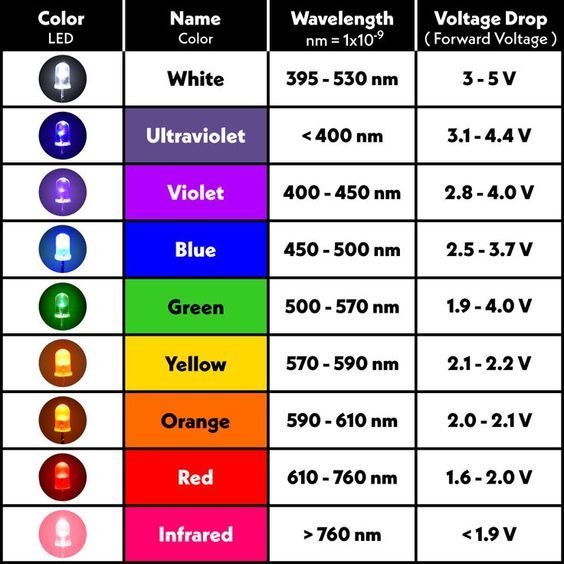
关于LED的基本公式和各种颜色不同压降的图表。
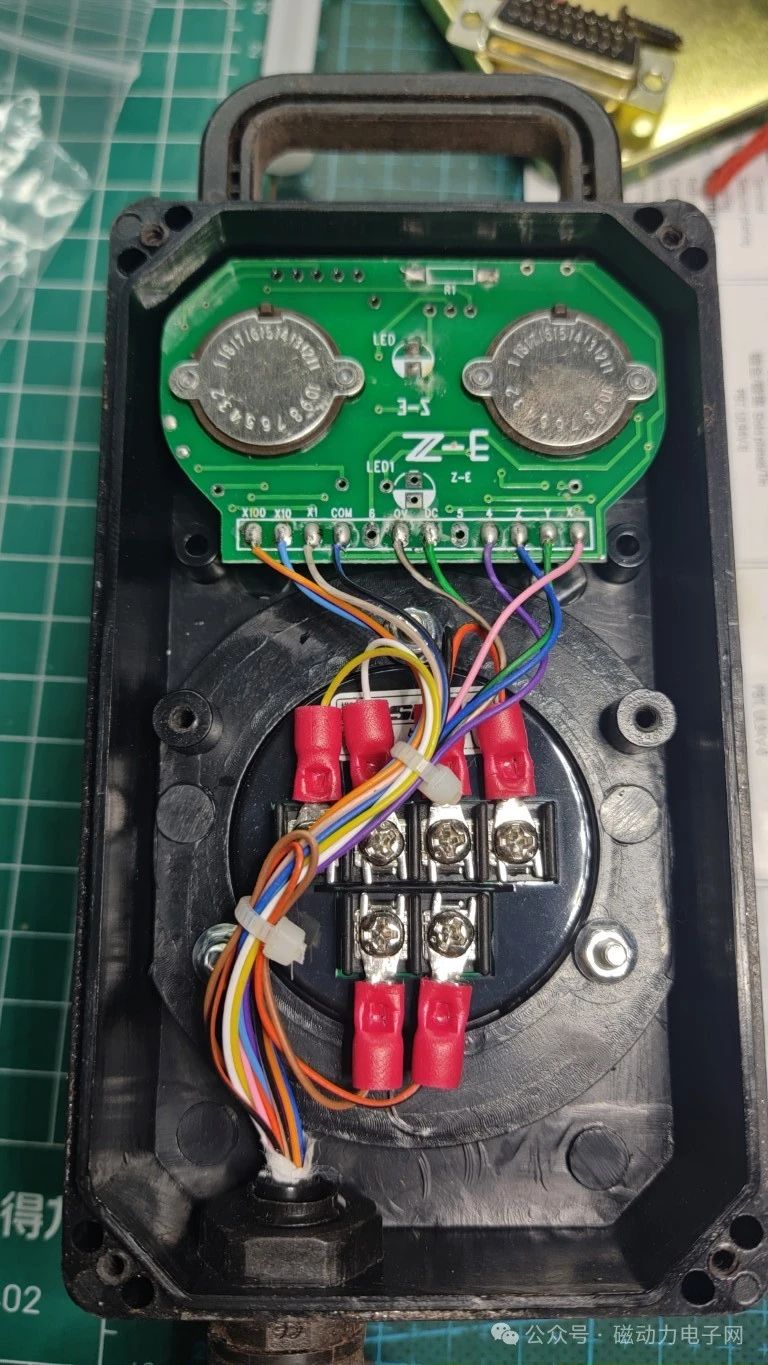
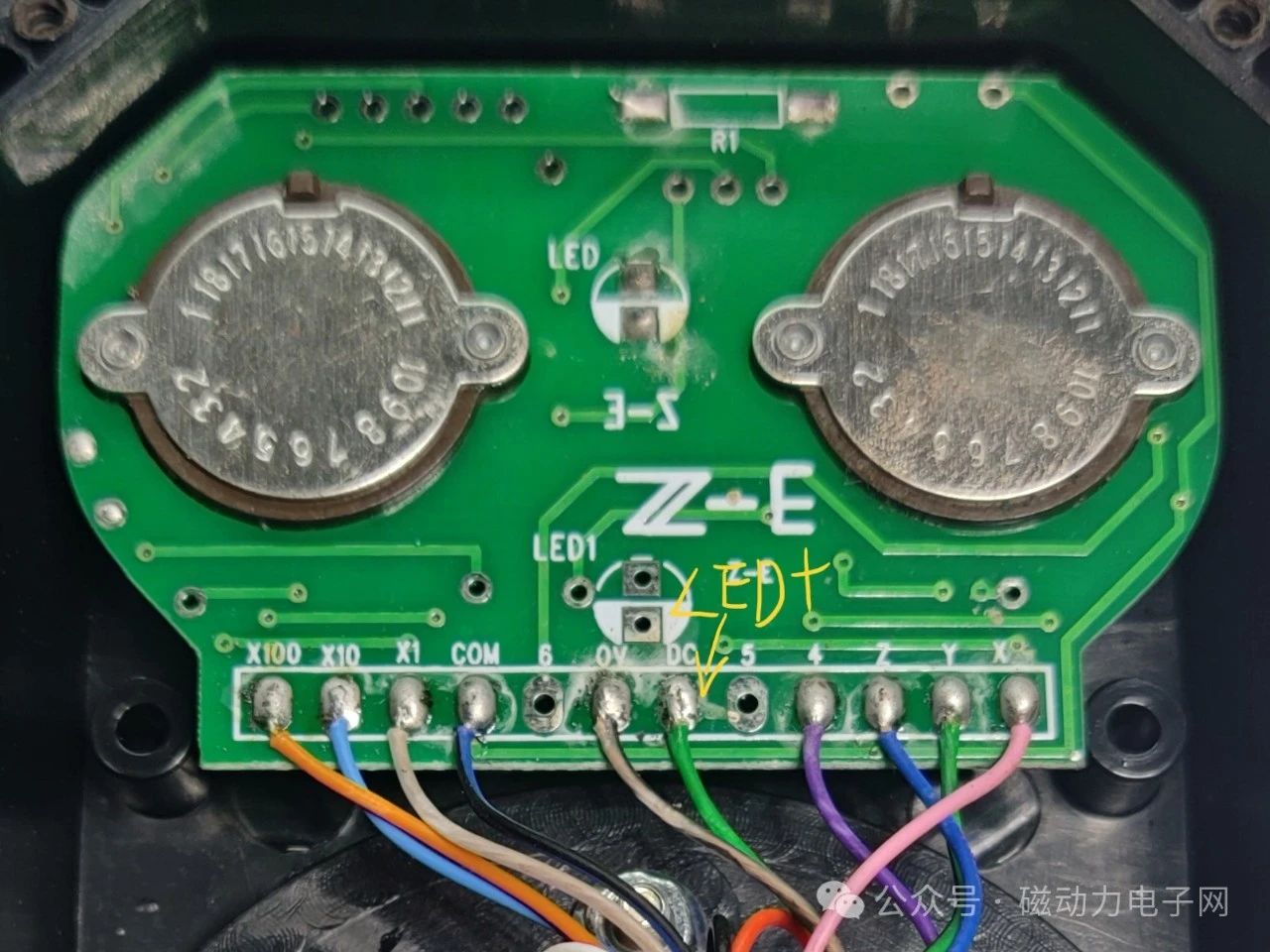
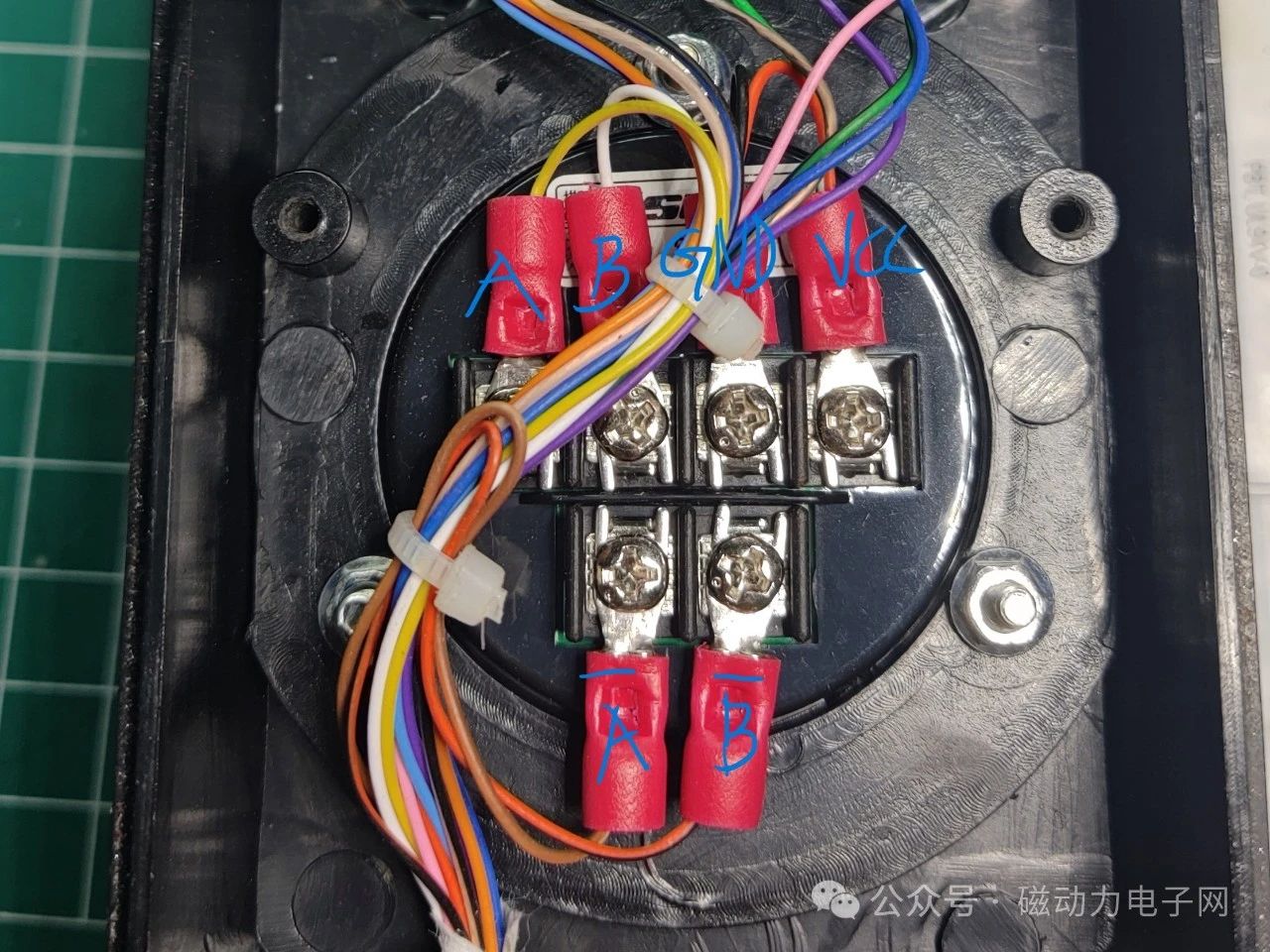
日本产TOSOKN 5L-100PPR,没找到具体资料,拆机查看接线定义, 各接线颜色参看图片上的。VCC是5V的,实际接入5V能正常工作。DC(LED+)接入5V时,LED比较暗,因R1实测电阻为10K,DC接入5V时可以更换R1阻值为1-2K,可提高亮度,或在DC接入更大的电压。


电子纸墨水屏的视觉体验类似于传统的纸张,良好视觉体验和低功耗的特性,使得墨水屏的身影越来越多的出现在人们身边,像电子书阅读器、电子价签、手持设备显示屏等等。墨水屏中的电子墨水是由一个个微小的墨水胶囊组成,胶囊里装有黑白混合的液体粒子,白色粒子带负电荷,黑色粒子带正电荷。根据电荷同性相斥、异性相吸的原理,通过对胶囊的两侧加上所需要的正负电荷,就能使黑白粒子像墨水一样移动,从而改变显示白或者黑。控制无数个墨水胶囊阵列就可以显示各种文字和图案。与LCD屏所不一样的地方,在于墨水屏只在刷新改变显示时才需要电荷,一旦刷新完成就不需要消耗电荷,就像墨水印刷在电子屏一般,所以相当的省电。
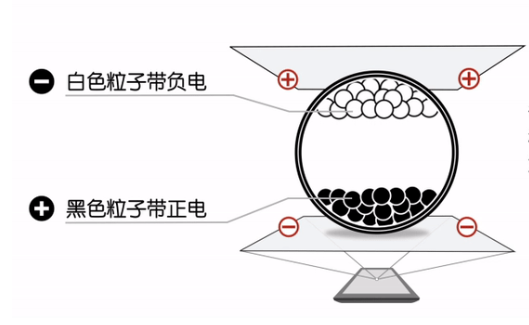
胶囊中的墨水粒子也可以为其它颜色,不一定只是黑或白。彩色墨水屏则是混合加入青色、洋红、黄色等颜色的粒子,可以实现全色域的显示效果。
墨水屏出色的显示效果和低功耗,再加上无线物联网技术,应用到电子价签上面,效果是相当的好。使用墨水屏的电子价签无论在明亮或暗淡的灯光下,都能保证清晰且接近传统纸质价签的阅读体验,具有极高的对比度和超宽视角。在无线电物联网的技术加持下,更是使电子价签具内容更新速度快、内容丰富、管理方便等传统纸质价签无可比拟的优势。
网络销售平台上有许多二手的墨水屏电子价签,多种尺寸都有,有些还是全新没有使用过的。也许是来源于倒闭的超商,价格也相当可以,几元就有交易了。对于电子爱好者,虽然很难直接使用这些价签,但可以拆解,重新利用上面的墨水屏等物料,用于制作自己的DIY项目。当然如果技术实力比较强的创客,也可以改写里面MCU的代码,那就能更方便利用起来。
下面拆解一款2.9寸三色黑白红墨水屏电子价签。一起来看看吧。



这一款价签的电池仓容易打开,可方便更换电池。可以看到电池为两颗CR2450并联使用,目的就是提供更大容量的3V电池,延长不更换电池情况下的可工作时间。

拆下电池后,可以观察到墨水屏上的内容并不会消失,依然清晰可读。

拆除前后外壳后,就是墨水屏本体和PCB了。

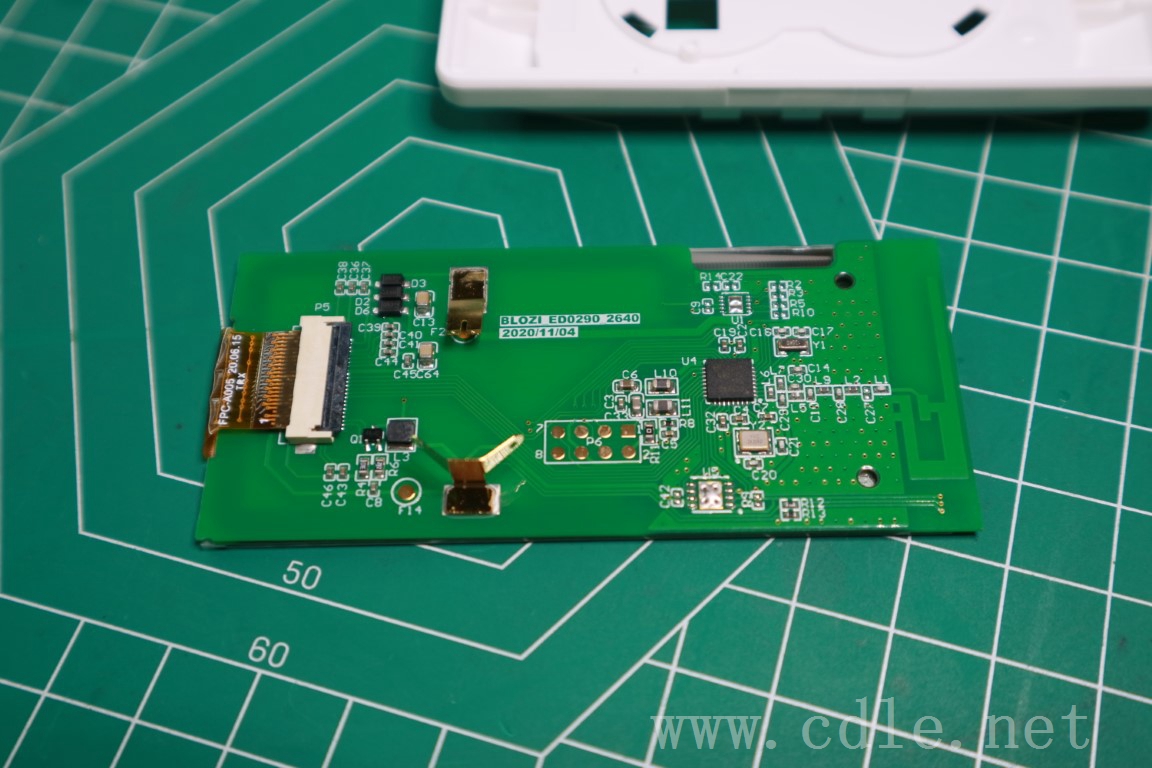
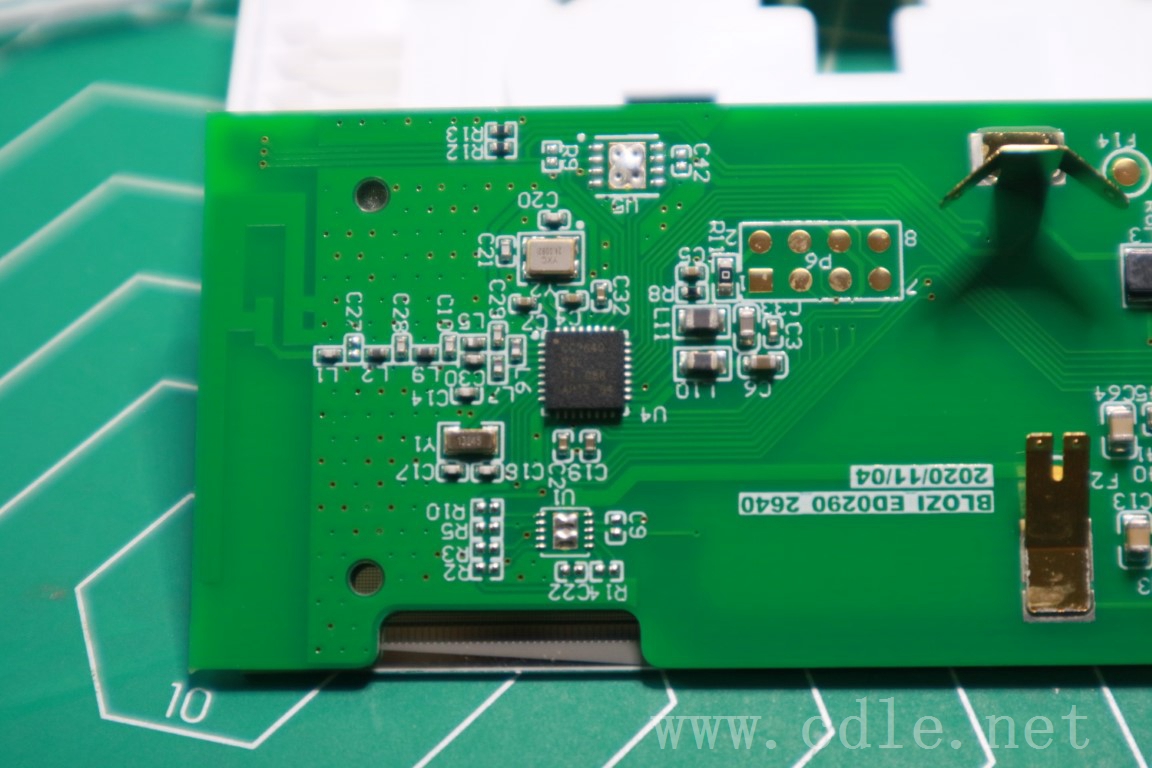
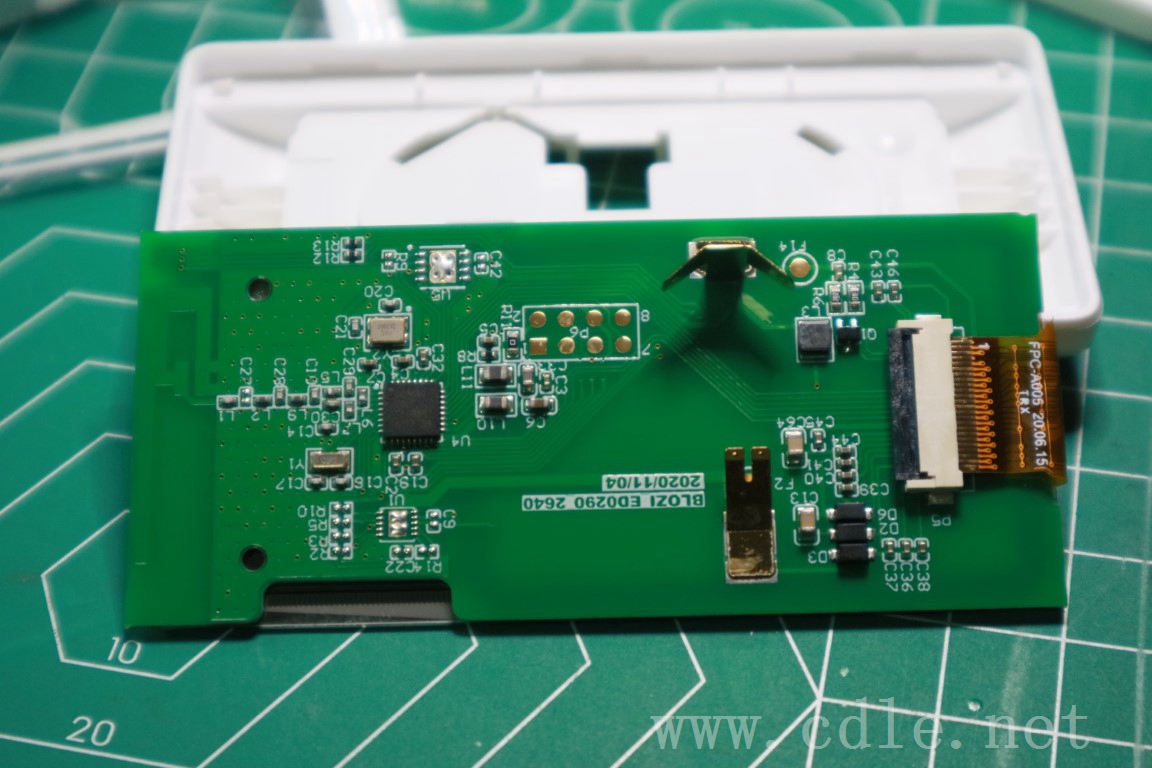
PCB上的主控MCU型号为CC2640,此芯片为TI公司生产的Arm Cortex-M3低功耗芯片,具有Bluetooth蓝牙无线功能。可以看到上图PCB最左端为蓝牙天线。CC2640的芯片手册可以参看链接 https://www.ti.com.cn/cn/lit/ds/symlink/cc2640.pdf
下图为此MCU的功能框图。

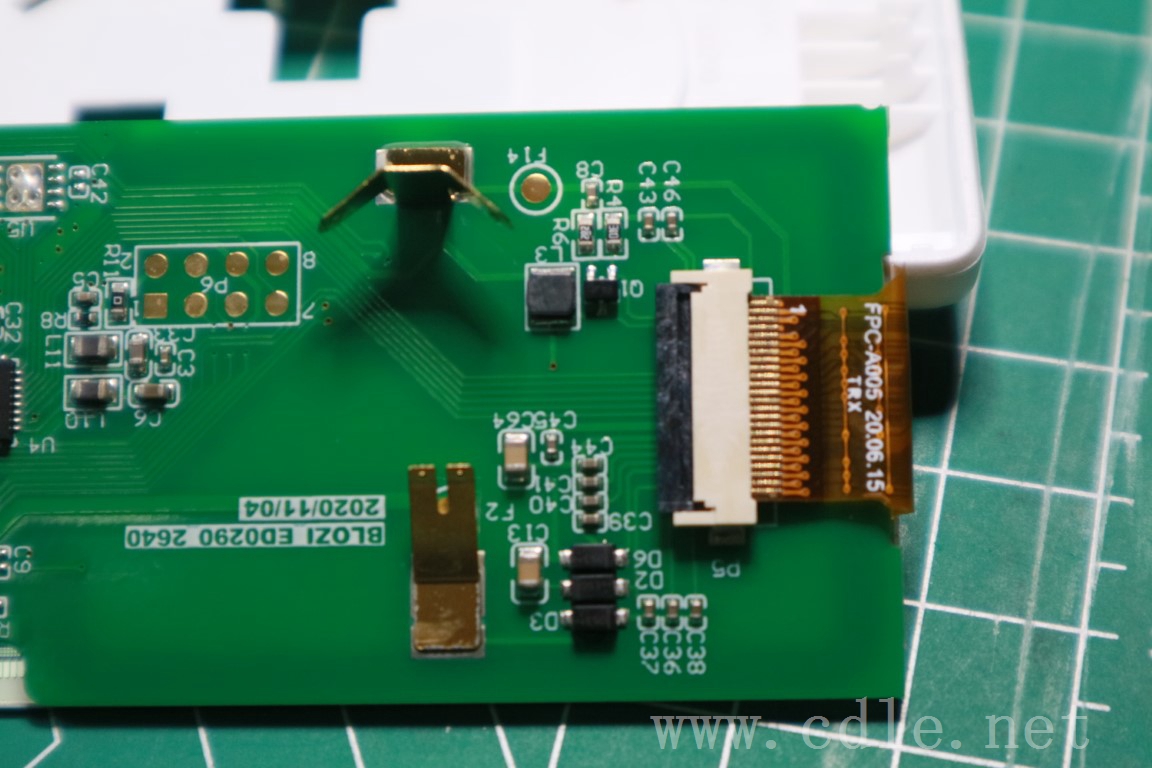
PCB的另一端则是墨水屏的FPC连接端子和外围电路。外围电路主要是一些电容,三个用于电源的二极管,还有一个由阻容以及MOS管组成的复位电路。

这个电子价签的墨水屏和PCB间用一张双面胶粘合,用热风枪稍微加热一下,就可以轻松分离。


全部拆解完毕。
20241012
