
关于M002-16A-16B如何连接变频器,可以看入门视频教程《M002-16A-16B 入门教程04-连接变频器》。有客户询问能否外接一个按钮进行控制变频器的正转开启和关闭。答案是可以的,利用“快捷键IO”和“IO输出”,M002可以把两个按钮开关绑定到两个输出端口上。下面是结合入门视频教程《M002-16A-16B 入门教程04-连接变频器》的设定来做一个外接按钮控制变频器正转启动和关闭。
要实现此功能时,有个前提就是变频器的速度给定应该是面板定给或预设给定,或者是VI(0-10V端子)给定组合面板给定等,也就是说M002用快捷键IO时只能控制正转启动,并不能给出0-10V的速度控制电压,所以必须由变频器本身给定速度。
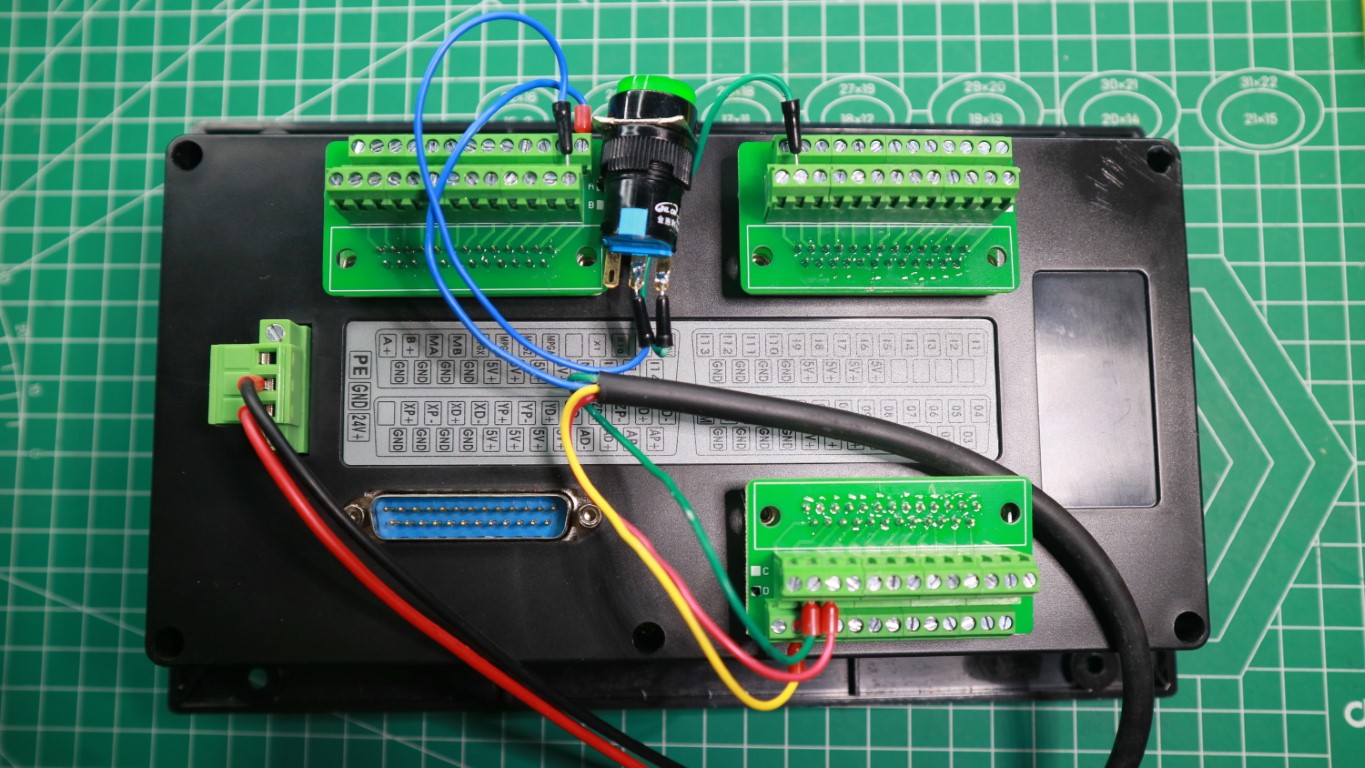
在《M002-16A-16B 入门教程04-连接变频器》中正转控制端口用的是O14,这里准备连接一个常开的开关来控制,首先把开关连接到一个没有使用的输入端口,这里随便选定一个I14端口,开关常开的两个引脚连接到I14和GND上。
进入控制器菜单 “配置”-“快捷键IO”-“下一页”,里面有“快捷输出1”和“快捷输出2”。
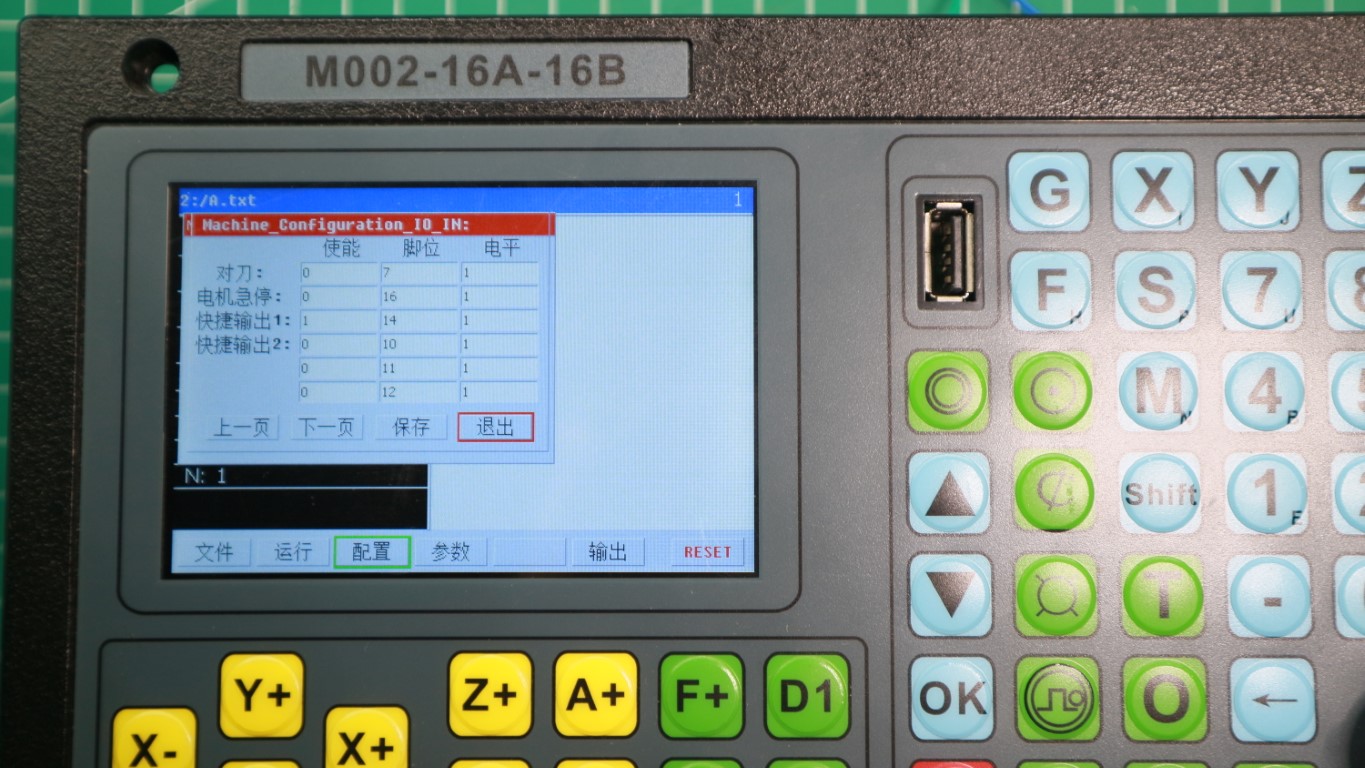
快捷输出1“使能”设1表示功能生效,这里的脚位14是指按键开关所连接的输入端口I14,使用的是常开开关电平设置为1,如果是使用常闭开关则电平设置为0。
进入控制器菜单 “配置”-“IO输出”,里面有“快捷输出1”和“快捷输出2”。

快捷输出1“使能”设1表示功能生效,这里的脚位14是指按键开关所要控制的输出端口O14,电平和主轴正转设置一样为0。可以理解为控制器上电后,第一次按下此开关时,O14端口电平由高变低,再按一次时电平由低变回为高,从而实现控制变频器的正转启动和停止。
这里只示范设置一个正转外接按钮。“快捷输出1”和“快捷输出2”可以分别设定两个按钮控制两个输出端口。可以用于变频器正反转,或连接固态继电器控制冷却阀,气阀,上料装置等等。最后要注意的事项是此功能不受RESET状态的影响。
B站观看