
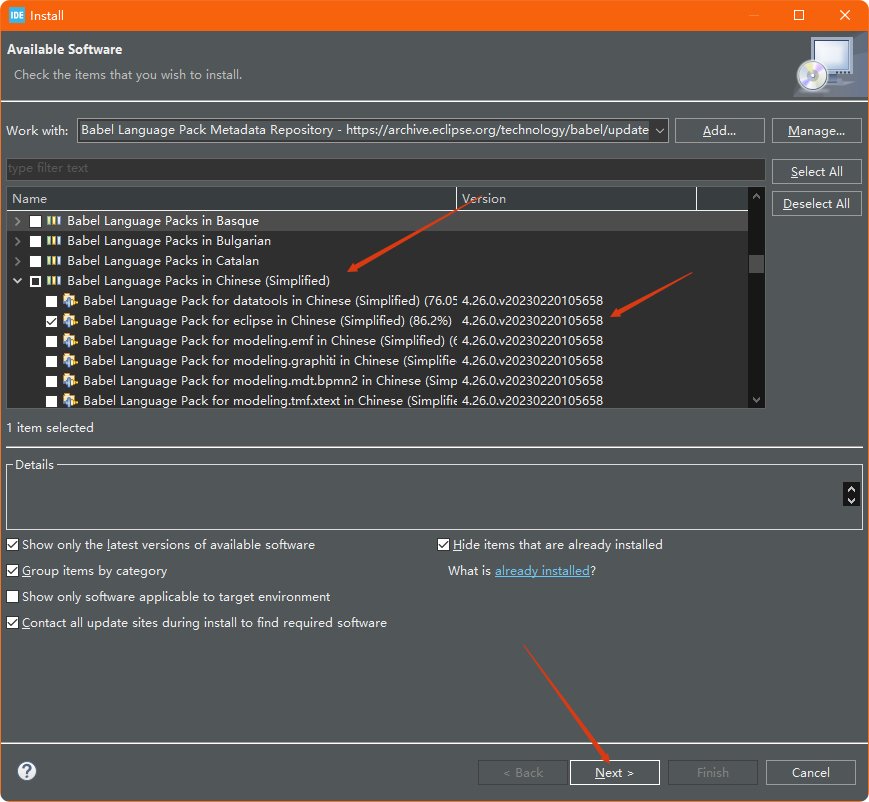
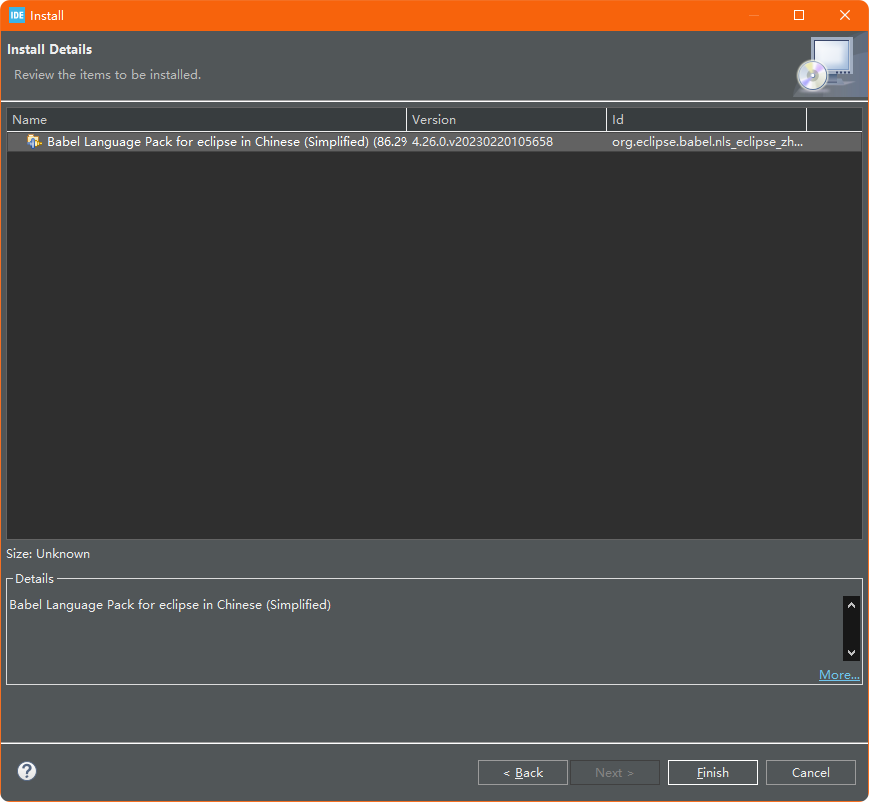
https://archive.eclipse.org/technology/babel/update-site/R0.20.0/2022-12/
当然如果有下载到离线包也是可以通过本地添加的。
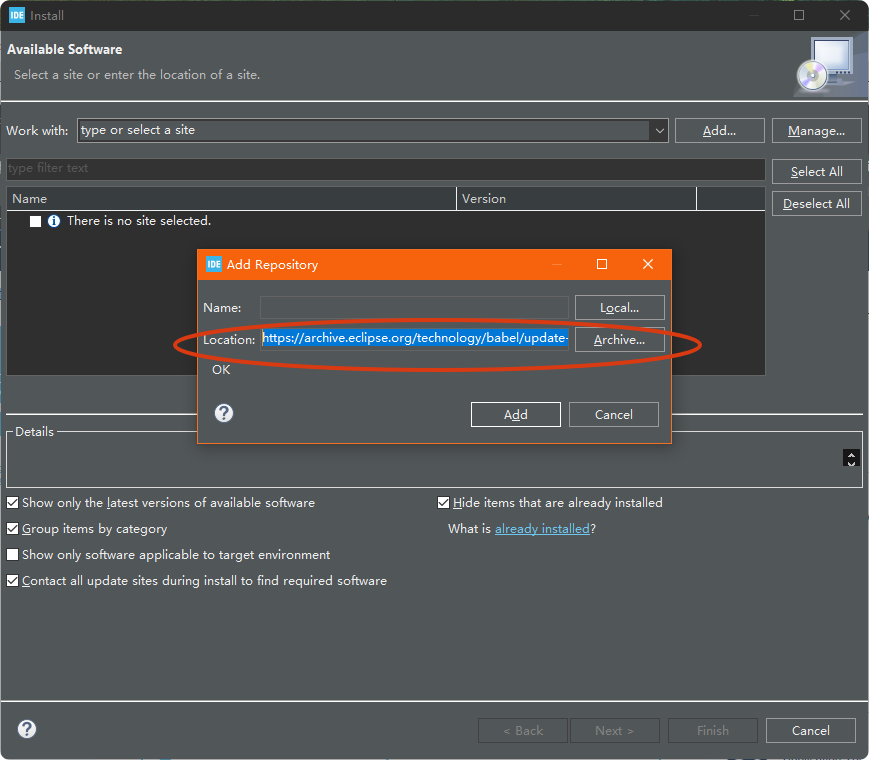

https://archive.eclipse.org/technology/babel/update-site/R0.20.0/2022-12/
当然如果有下载到离线包也是可以通过本地添加的。
德国创客制作的浏览器弹球游戏,用音量控制器控制,有点意思!在网页中用JavaScript获取音量控制器的音量+,音量-,静音3个键值,实现游戏中的控制功能,有点像当年街机的风格,比起键盘控制有趣多了。
网址是https://heckmeck.de/computerstuff/knob-out/
翻出多年前自己设计的基于 STM 32 音量控制器,能玩。可跳转到本站了解这个控制器的详情http://diy.cdle.net/?p=15
B站观看
Raspberry Pi Pico是树莓派基金会在2021年1月新发布的微处理器新品。使用基金会自己研发的RP2040芯片,国内现在整个开发板模块售价为30-40元左右。相较于树莓派的其它‘微电脑’型号,这一款产品因为是单片机MCU型的,其最高运行频率可达到133MHz,对IO及模拟信号的操作和处理有更低的时间延迟,可以弥补Raspberry Pi物理互动方面的不足,更类似于‘Arduino’开发板。

官网上的性能介绍:
 五个支持软件,为方便下载这里同时给出下载地址。
五个支持软件,为方便下载这里同时给出下载地址。Python 3.9
https://www.python.org/downloads/windows/
Git
https://git-scm.com/download/win
ARM GCC compiler的安装
这个编译器安装没什么好说的,直接下一步、下一步就完事了。在安装完成时,最后的选项选择时,全选。
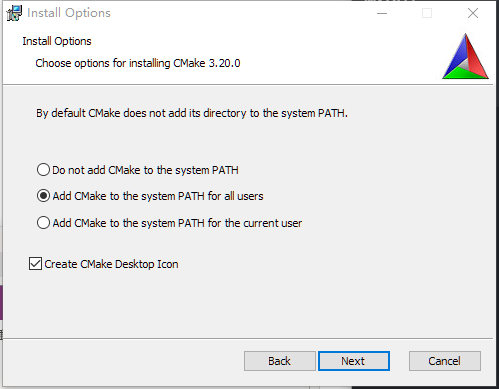
CMake
在安装过程中,当安装程序提示时,将CMake添加到所有用户的系统路径中。
Build Tools for Visual Studio 2019

这里我是安装VS2019社区版,安装选项为‘使用C++的桌面开发’,‘Windows10 SDK’必须要打勾。
Python 3.9

在安装过程中,选择“为所有用户”安装了该软件,并选择将Python 3.9添加到系统PATH中。 在Python末尾提示时,应该选择禁用MAX_PATH长度限制。
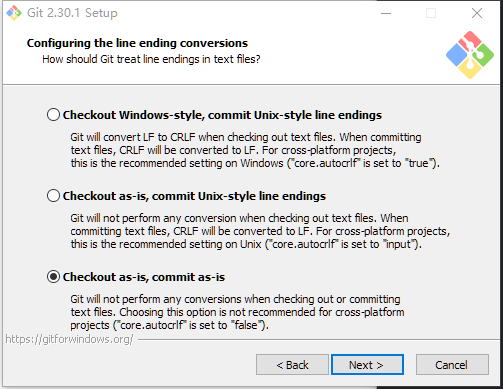
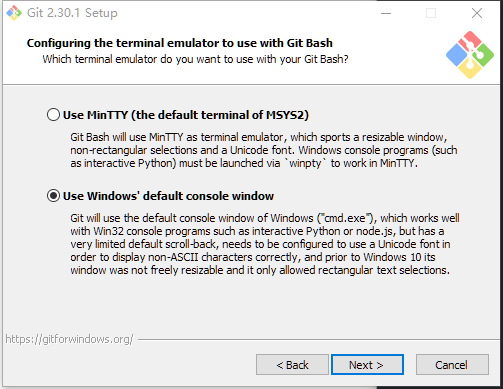
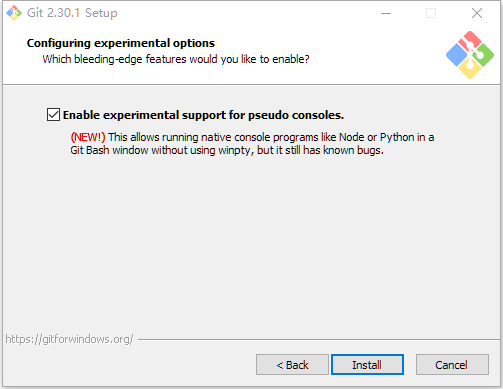
Git

注意下面3个选项要选上。
获取SDK和例程
以上软件安装完成后,重启一下PC。
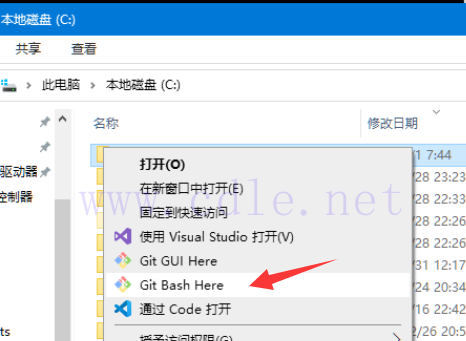
重启后在硬盘上新建一个文件夹,我这里是在C盘中新建一个名为‘SDK’的目录。
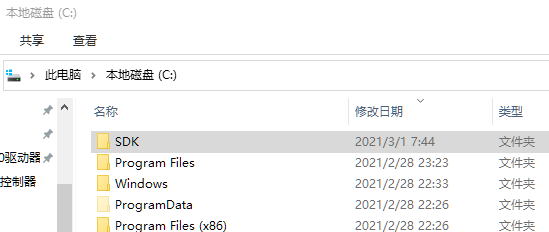
选定‘SDK’后按鼠标右键,选‘Git Bash Here’。
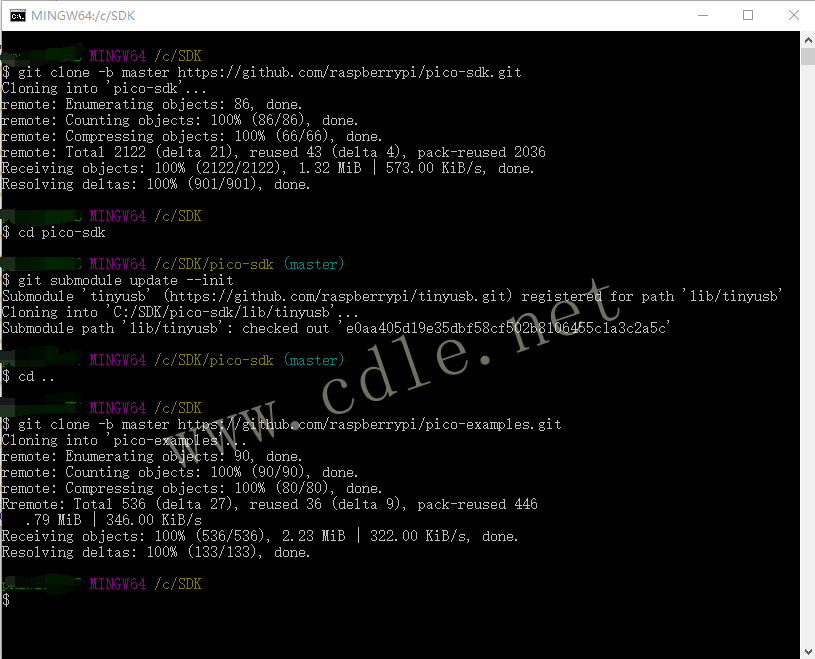
进入Git界面后,分别输入如下指令
git clone -b master https://github.com/raspberrypi/pico-sdk.git
cd pico-sdk
git submodule update –init
cd ..
git clone -b master https://github.com/raspberrypi/pico-examples.git
执行时的界面如下。
上面已经安装完工具链软件以及Pico的C/C++SDK,编译源代码时如果要使用命令行方式会比较麻烦,这里不说,下面介绍的是使用微软的Visual Studio Code去编译源代码。如果你没有安装VS Code,还需要到https://code.visualstudio.com/download下载安装。(关于如何在VS Code安装中文汉化包请自行了解)
安装完成后还需要为其设置之前的工具链软件和SDK路径。
首先在开始菜单找到Visual Studio 2019的Developer Command Prompt菜单并打开。
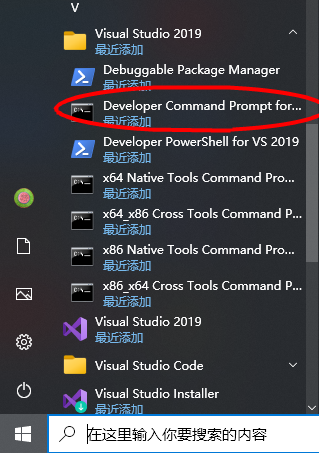
在打开的指令窗口中输入code,则会打开设置了所有正确环境变量的Visual Studio Code,以便正确配置工具链。注意不要直接点桌面的VSCode打开它,这会可能导致配置的失败,除非你足够的熟悉了解它和相关的工具链软件。

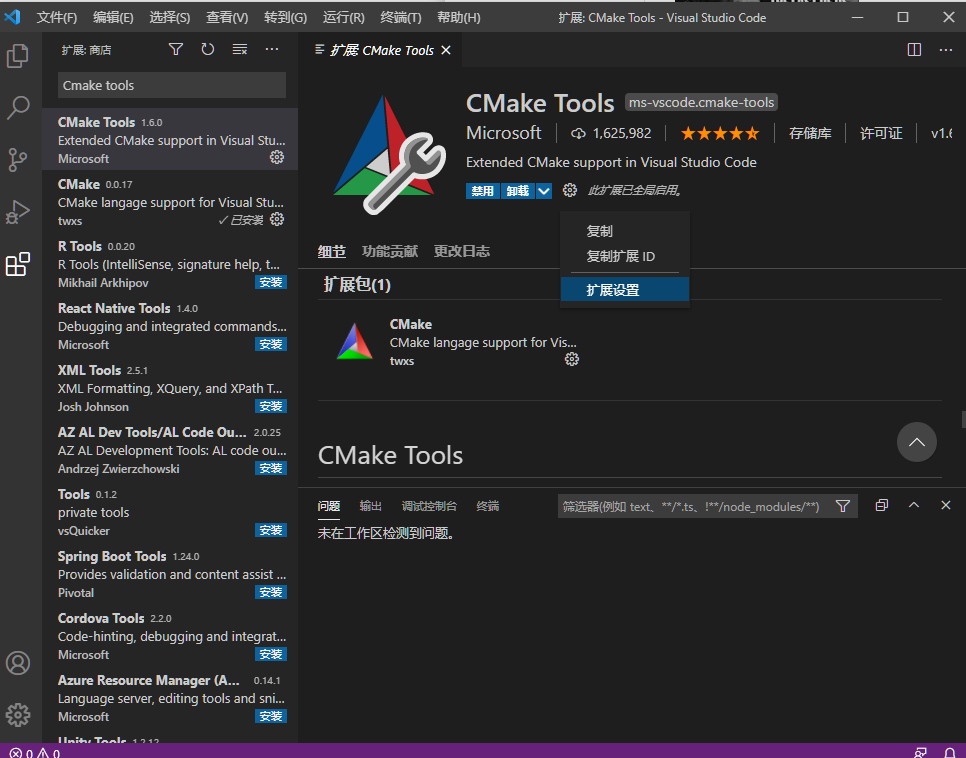
在打开的VS Code中安装,CMake Tools。
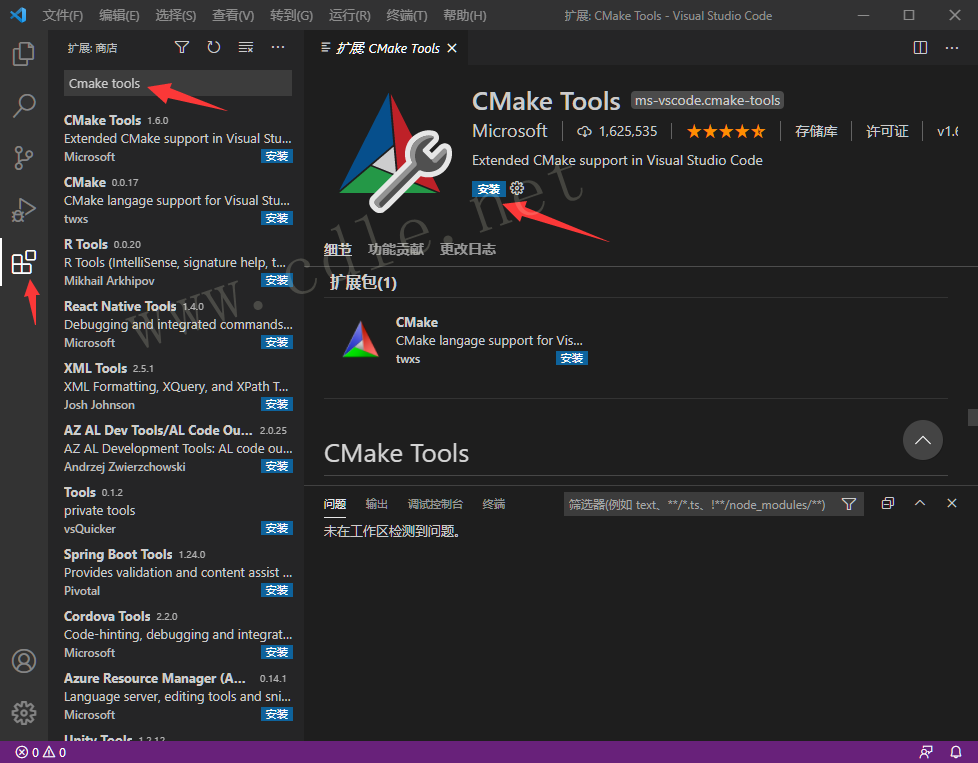
安装CMake Tooks扩展后,点齿轮状图标,打开设置项进行SDK路径设置。
找到Cmake:Configure Environment项,并增加一个PICO_SDK_PATH项,项目的值就为上面下载SDK时的路径。
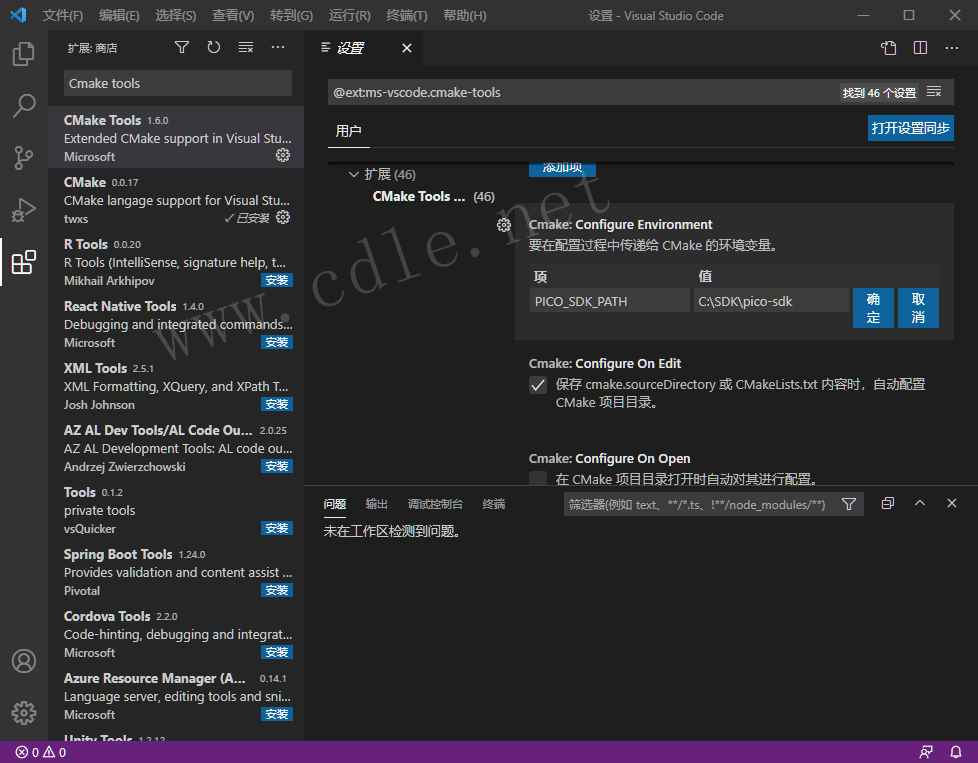
找到Cmake:Generator项,加值’NMake Makefiles’ 。

至此完成了环境的搭建。
下面就可以用下载下来的SDK例子进行编译测试。
在VS Code打开下载的pico-examples目录,打开后CMake自动配置。
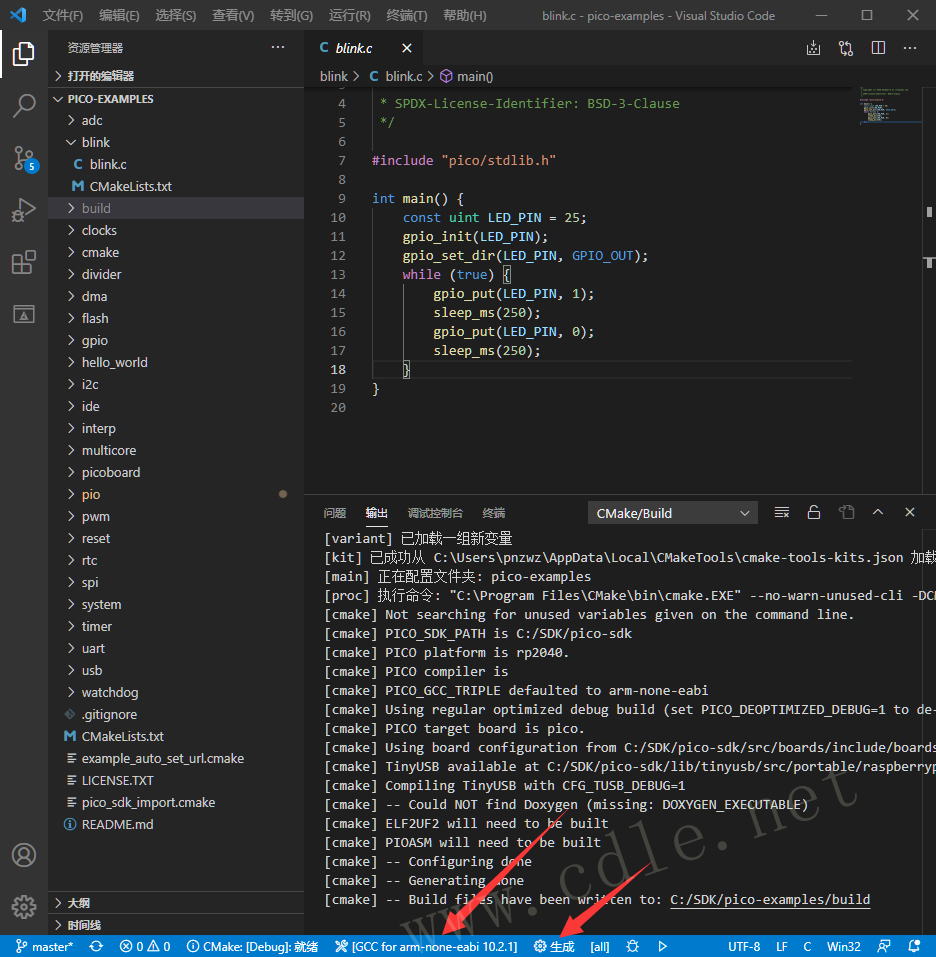
活动工具包需要选择 ‘GCC for arm-none-eabi’。生成后,则进行编译。编译完成的文件会被放在例子目录下的build目录下。注意,如果编译不能进行,则要尝试用Visual Studio 2019的Developer Command Prompt菜单来打开VS Code。
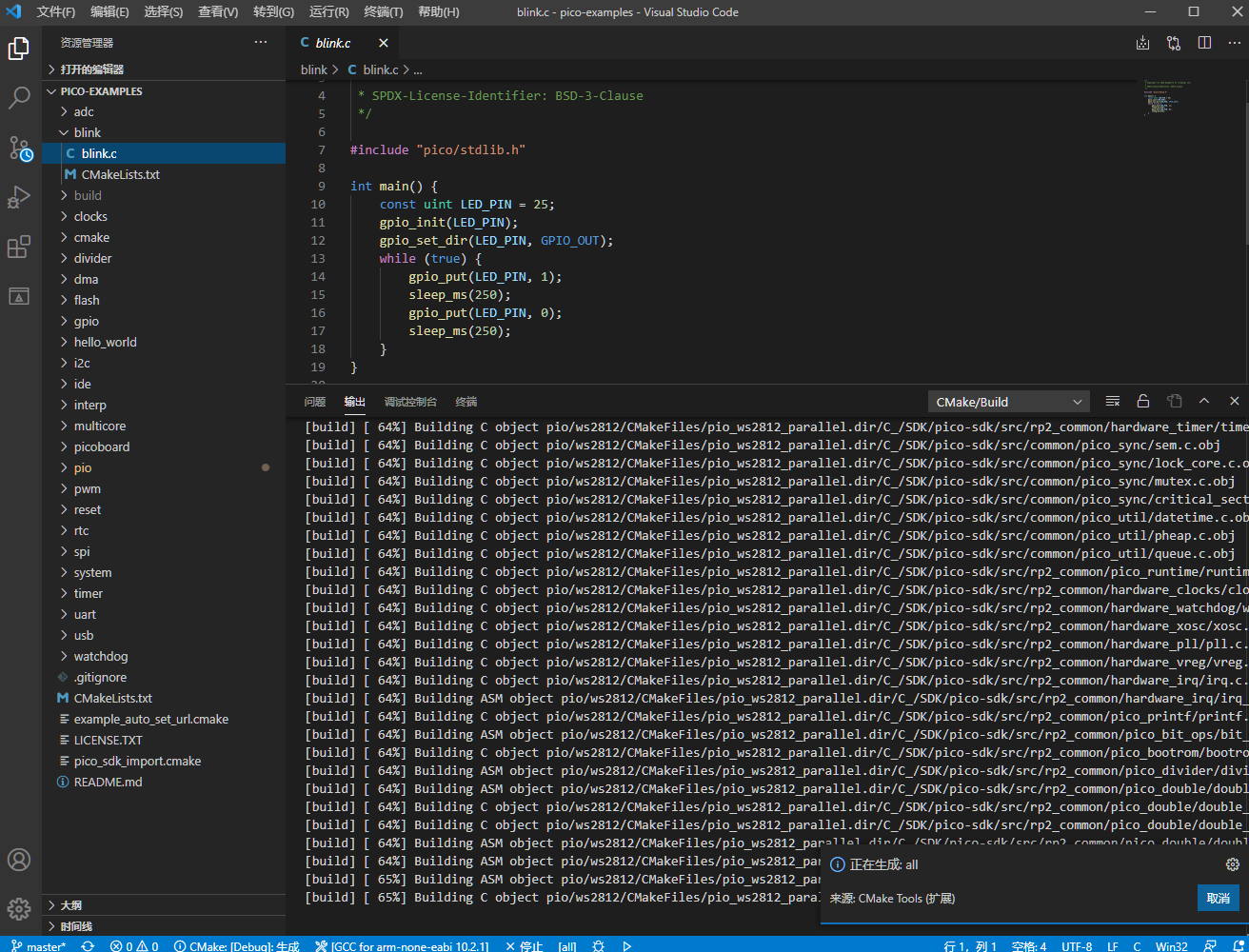
编译中的界面。
编译完成后,则可以下载文件到Pico下进行测试。为了直观查看,可以使用blink例子,这个例程就是让板上连接到GPIO25的LED闪烁。首先在pico-examples\build\blink目录下找到编译好的blink.uf2文件。
然后按着Pico的BootSel按钮,把Pico接入PC的USB端口,这时会在PC上出现一个名为RPI-RP2的存储盘,把blink.uf2拖入该盘中,写入后,Pico自动重启并运行程序,让LED闪烁。