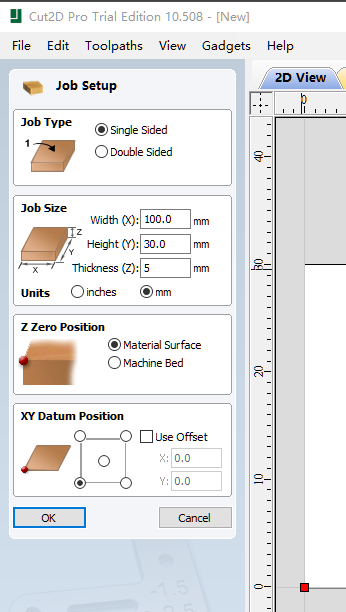
新近安装Python3.9.1,使用自定义安装,安装路径C:\Python39。
然后使用pip在线安装库时,发现库不是安装在Python安装路径之下,导致原来做的程序无法使用。分析原因后,发现pip的默认安装路径是在用户数据路径之下,而不是指向Python安装路径之下,导致Python运行代码时无法加载下载的库。
用命令pip show pip 检查pip信息,本地路径c:\python39\lib\site-packages,并没问题。

虽然可以用 pip install -t ‘文件夹路径’ ‘库名’ 这样的指令方式把库安装到指令目录,但每次这样会有点麻烦,另处的方式就是修改pip默认的安装目录。方法为修改Python的site.py文件。
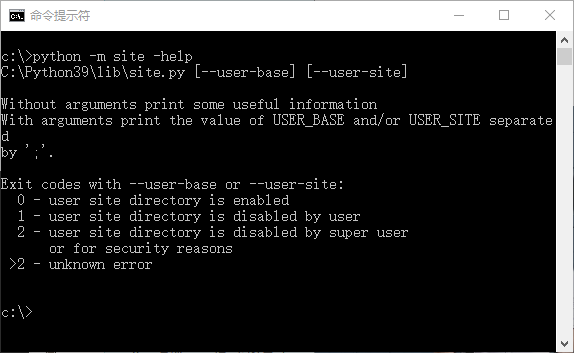
使用python -m site -help可以查看到site.py具体所在目录。
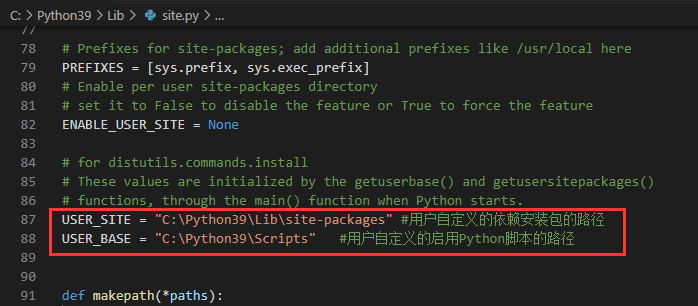
打开并编辑“USER_SITE”和“USER_BASE”,指向需要的目录,并保存。
然后安装一个VSCode用到的代码分析库pylint来进行检查目录设置是否正确。
使用指令 pip install pylint安装,打开C:\Python39\Lib\site-packages目录,pylint正确安装在此目录了。

也可以用pip show pylint来检查pylint库的信息。