
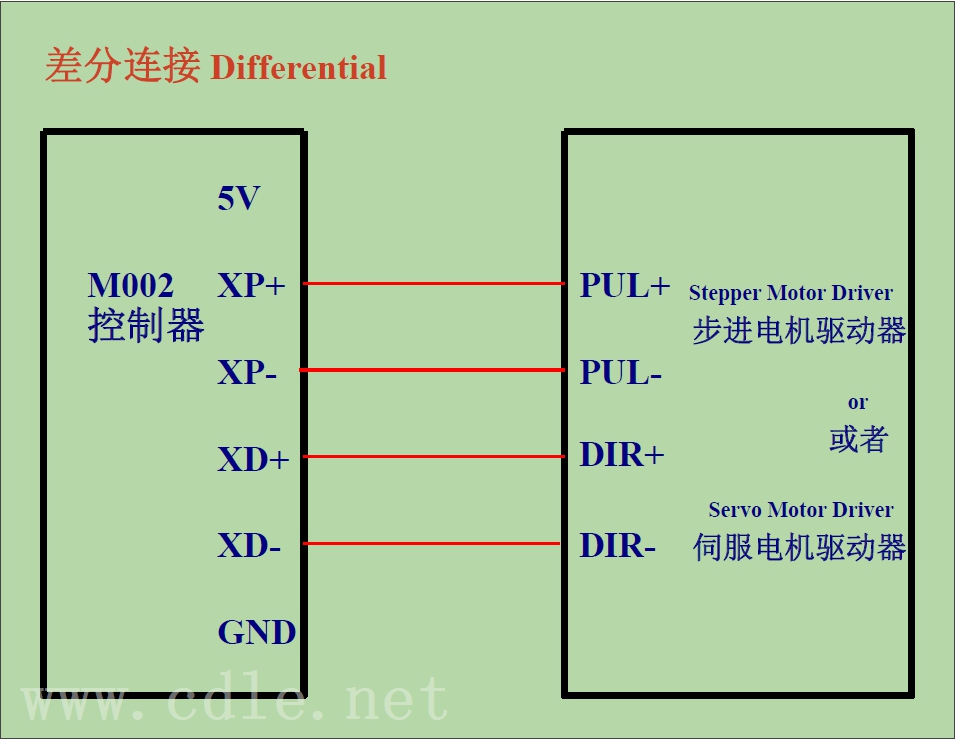
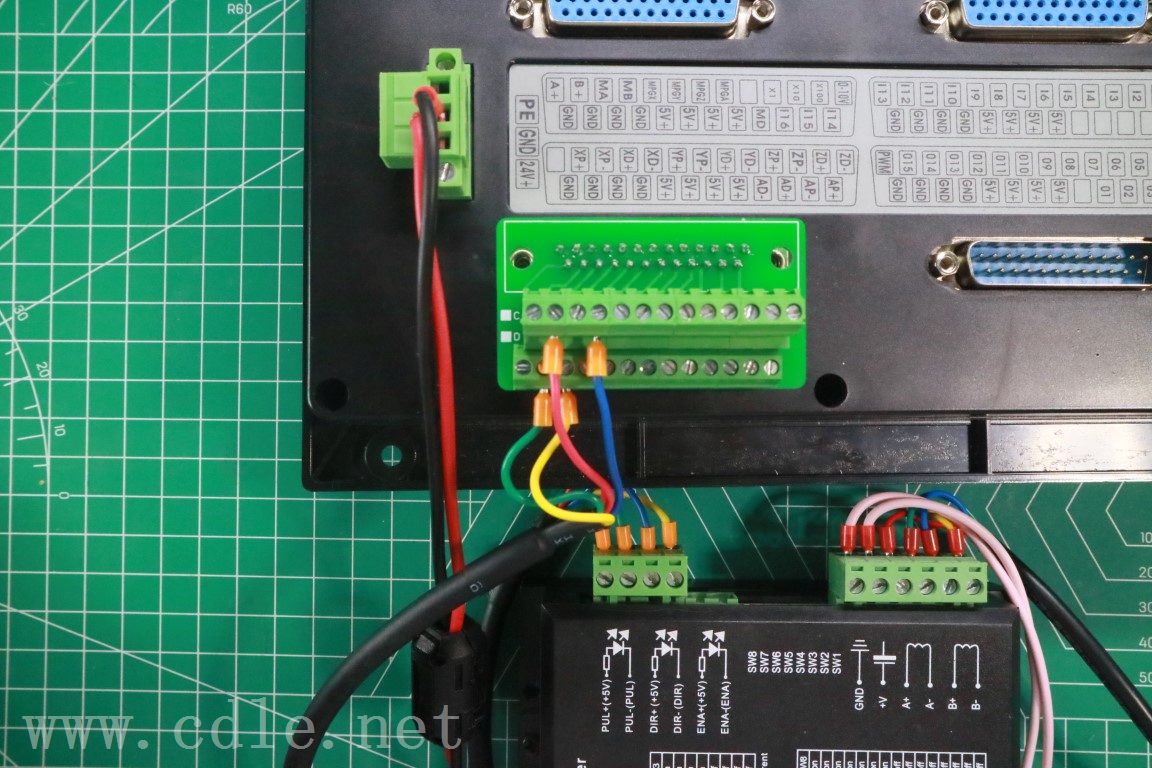
M002-16A-16B的脉冲输出端口为5V差分输出。可以根据实际需要用以下三种方式连接到电机驱动器。其中抗干扰能力最强的为差分模式。
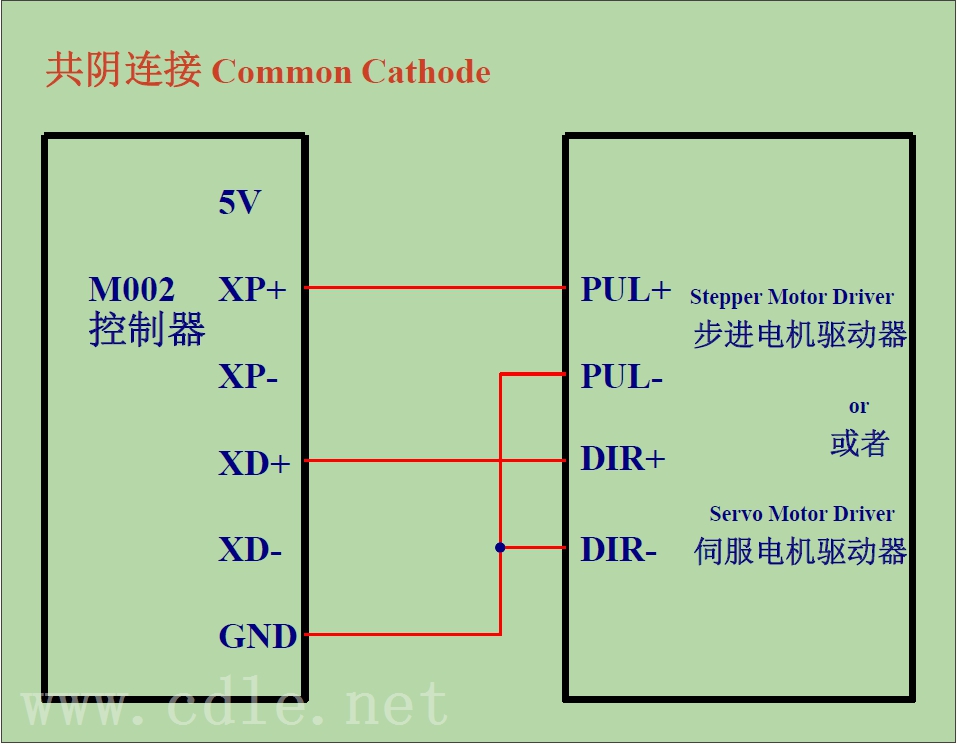
注意:若使用共阴连接时,驱动器的共阴线要连接到接线端子的GND上,不能连接到电源的负极。
注意:控制器电源PE端应连接到地线。
也可以观看教学视频:M002-16A-16B 入门教程03-连接驱动器
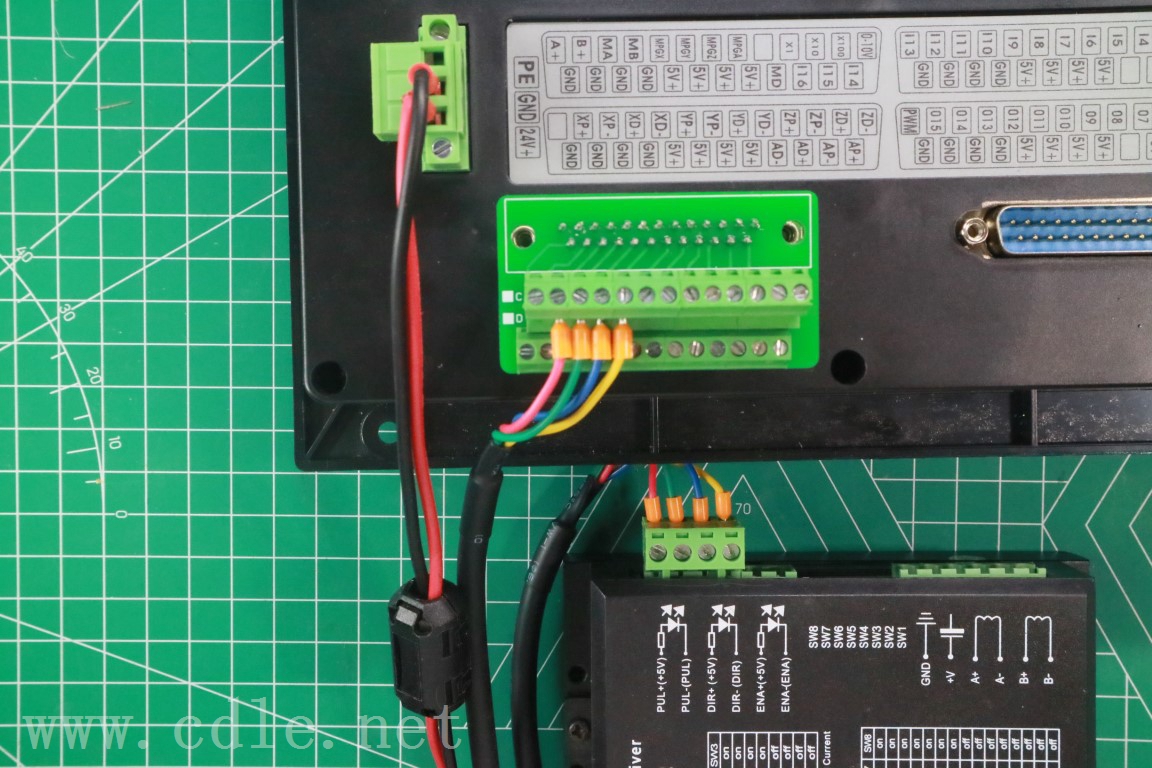
差分模式:
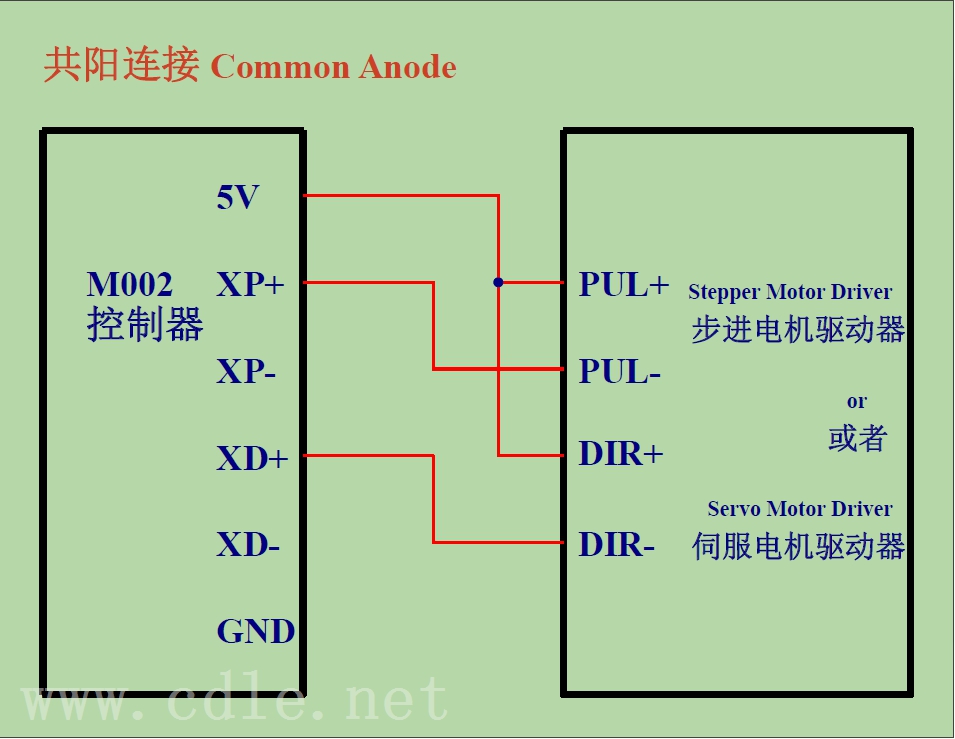
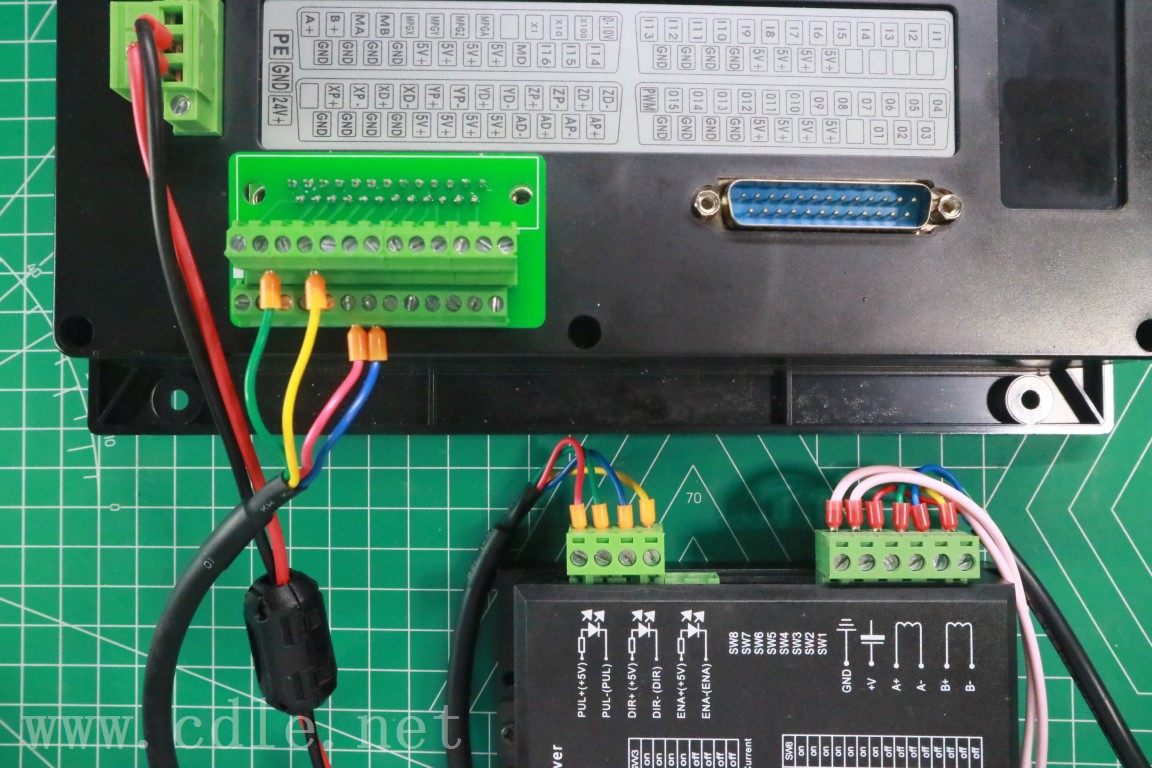
共阳模式:
共阴模式:
20241014
M002-16A-16B的脉冲输出端口为5V差分输出。可以根据实际需要用以下三种方式连接到电机驱动器。其中抗干扰能力最强的为差分模式。
注意:若使用共阴连接时,驱动器的共阴线要连接到接线端子的GND上,不能连接到电源的负极。
注意:控制器电源PE端应连接到地线。
也可以观看教学视频:M002-16A-16B 入门教程03-连接驱动器
差分模式:
共阳模式:
共阴模式:
20241014
B站观看
本站观看(速度慢)
20240125
B站观看
本站观看(速度慢)
20210107