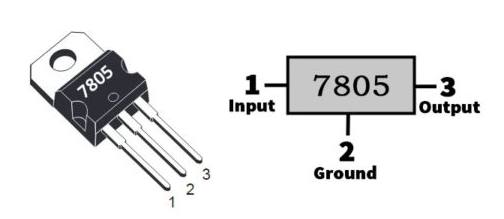
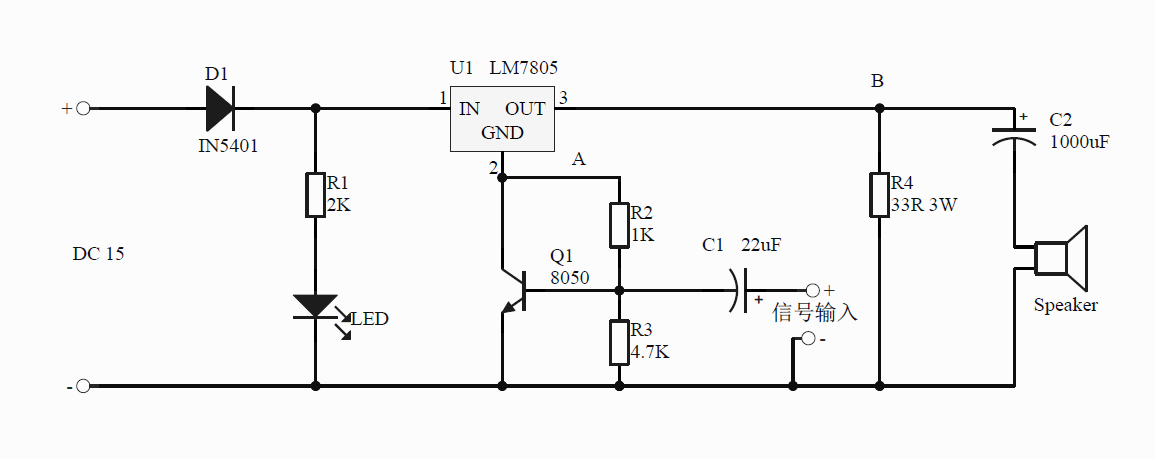
前几天,发了一篇《电路分析4-7805放大器》简单介绍了一下关于线性稳压78系列芯片的一种特殊应用。有朋友认为此电路是不能正常工作的,认为只能用于稳压电路上。其实此电路就相当于一个A类放大器,功能是可以实现音频放大功能的,只是电路简单性能肯定不会太好。实际效果如何呢?趁中秋假期,抽空利用万用板焊接一个,元件数值均按照图纸上的,只是家中没有3W的33欧姆电阻,用了一个10欧和一个22欧1/8W电阻代替,7805用的是贴片型号,没有安装散热片,只是作为实验电路使用问题不大。
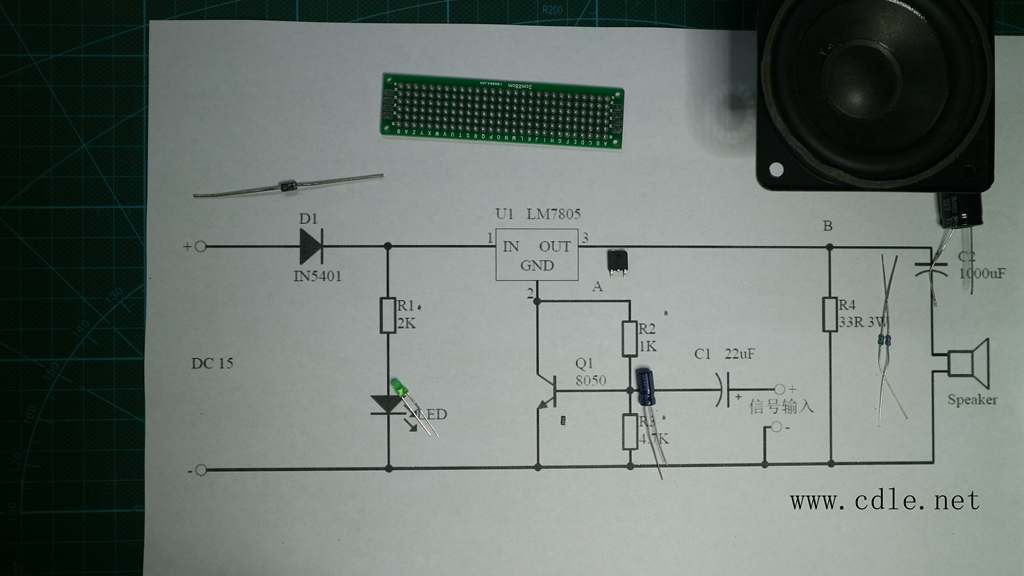
焊接无误后,接入12V直流电源,在没有信号输入时输出电压大约5.7V,7805的2脚电压约为0.7V,电流大约为190mA。在有信号输入时,电流读数不变。因没有散热器,所以发热会很严重,时间一长温升过大时,就会产生失真。这电路还有更简单的版本,就是使用一个电阻取代三极管电路。本电路非常规使用的电路,不推荐实际中使用,如要使用则需要安装一个大的散热器,输入电压也可以减小一些,减少功率损耗。现在D类音频放大芯片很多又便宜,所以这种电路只适合学习实验当中使用。
 下面是实验的视频
下面是实验的视频