



原理图模板
如今EDA软件可以轻松获得,绘制原理图只需要在电脑上操作就可以轻松完成。不需要像以前那样用到尺子、三角板、圆规这些工具了。在网上看到一个爱好者Jan Štech分享了一个小巧的原理图模板3D模型,3D打印出来,蛮好玩的,狂热的电路爱好者可以放到背包或钱包里,在学校、咖啡厅甚至在野外没电脑的地方都可以随时把灵感用笔和纸画出漂亮的电路图。
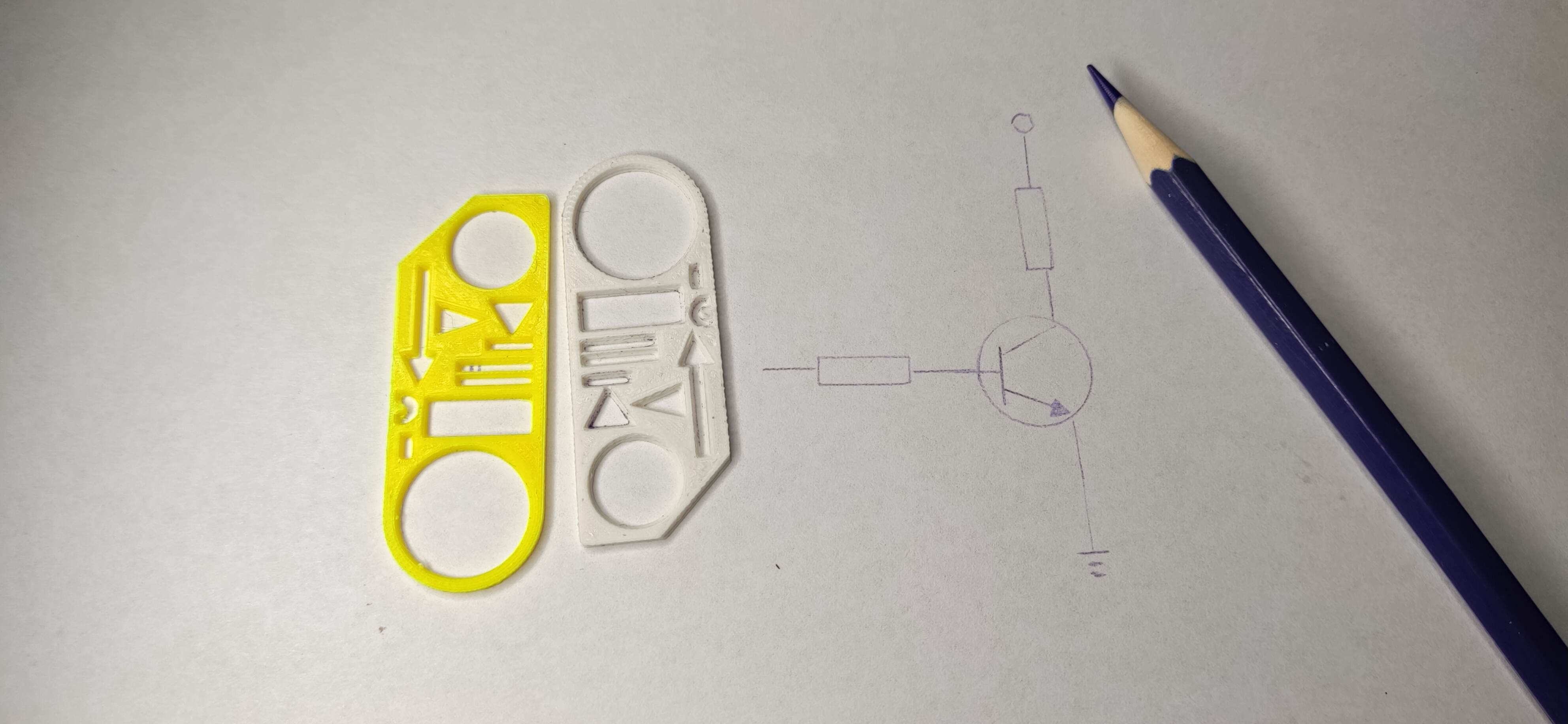
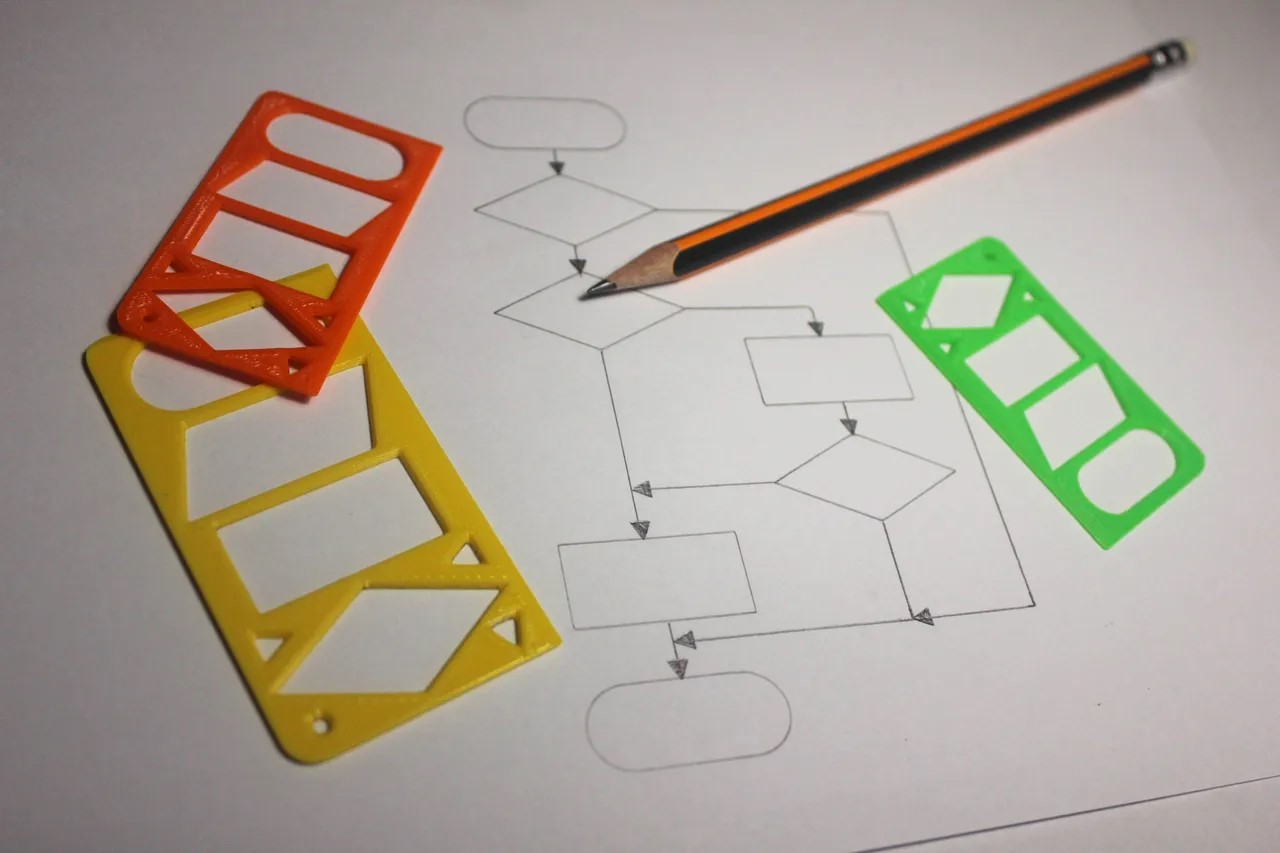
打印了两个。作者还有逻辑电路模板、编程框图模板。有兴趣可以在下面的地址获取模型。
电路模板
https://www.printables.com/model/759378-template-for-electrical-diagrams
逻辑模板
https://www.printables.com/cs/model/777808-template-for-logic-diagrams
框图模板
https://www.printables.com/cs/model/780713-template-for-flowchart-diagrams
以下图片来源作者在https://www.printables.com/的分享

20240229
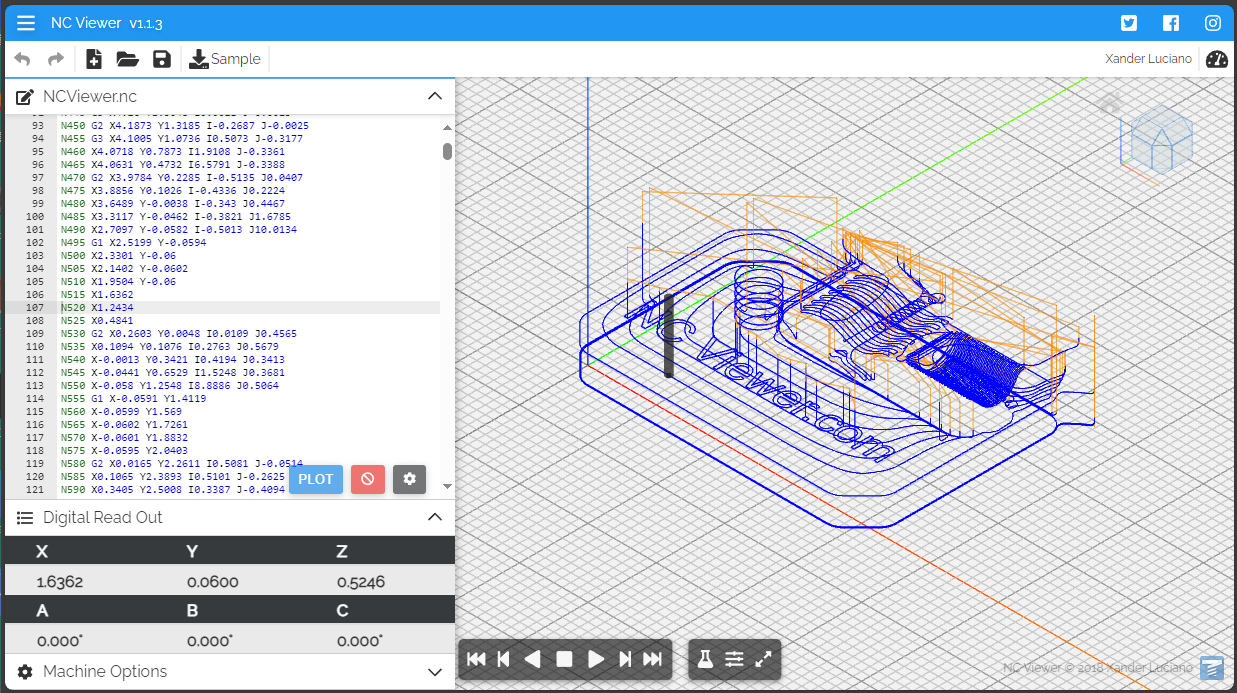
免费在线式G代码G-Code仿真模拟器
今天介绍一个在线式的G代码仿真模拟器,可以仿真预览CNC 数控机床、3D打印机、写字机等设备的G-Code。这个模拟器可以直接在浏览器上运行,无需安装,使用方便,地址为https://ncviewer.com/ 可以加载NC刀路G代码文件,3D预览显示刀路路径,并可以运行仿真G代码,并能编辑、保存G代码,方便检查G代码、学习G代码。使用方法简单,打开即用,这里不做详细介绍了。
20240225