SMC4 四轴脱机控制器支持16个输入端口,标号为IN1-IN16,每个输入端口功能不固定,具体功能需要在系统中配置或在程序中通过程序指令使用。
输入端口定义:
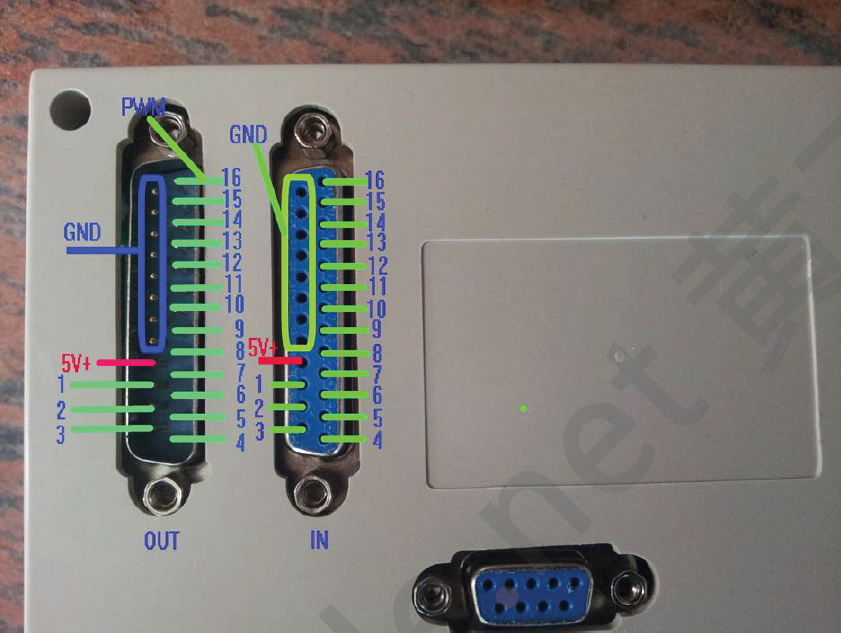
下图为主机后面板上两个DB25端口分别为OUT和IN端口,其中图上右边的DB25端口为IN端口,有8个GND引脚、16个IN引脚,1个5V电源输出(500mA)。
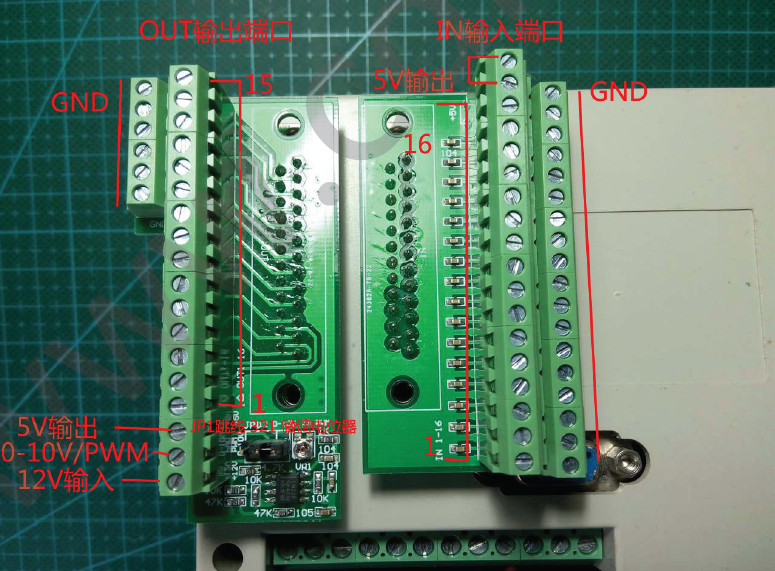
下图为主机后面板接入IO转接板的引脚定义。IN输入转接板并没有增加功能电路,脚号功能上仍然于DB25一样,只是更方便于接线。
输入端口可以用做如下功能:
1-限位输入
2-机械原点输入
3-对刀器输入
4-快捷功能输入
5-程序等待输入
不论是机械开关还是传感器都可以用于上面所列的功能。
连接方法:
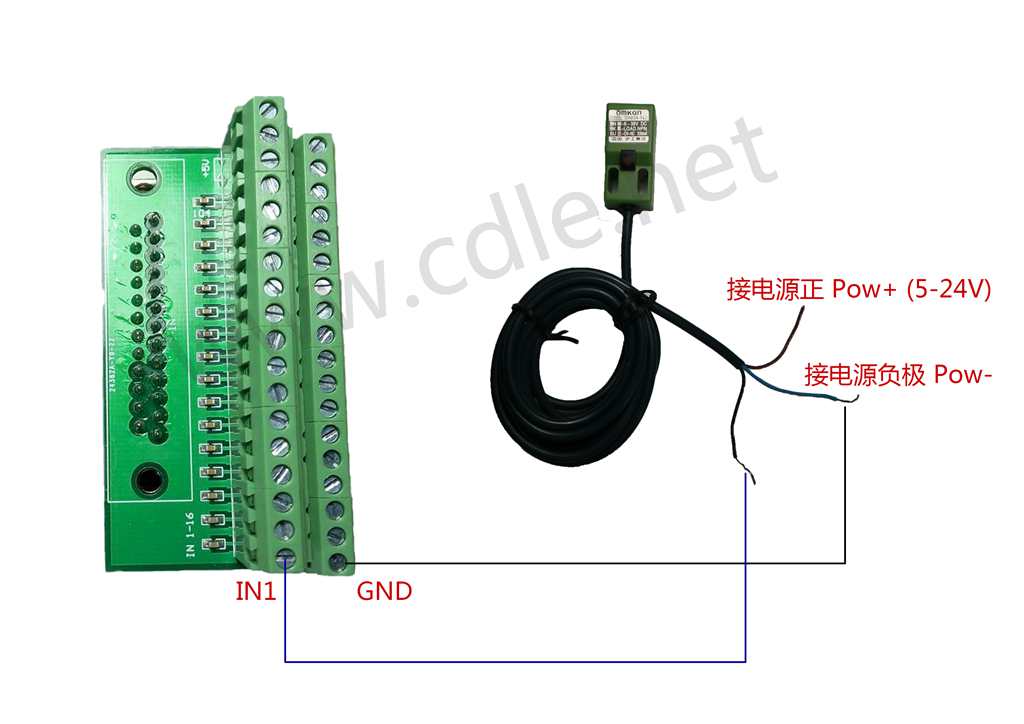
SMC4四轴控制器的输入端口可以支持机械式开关和NPN型的电子传感器。电子传感器的类型必须是NPN型, 可以是常见的光电传感器、接近传感器等等。使用传感器连接时,传感器所用电源不得超出24V,推荐使用12V,也可以和SMC4共用一个电源。每个输入端口只能设置一个功能,比如IN1设置成限位功能后,不可再把这个端口设置成快捷按钮。(相关资料:《了解一下接近传感器 》/ 《了解一下光电传感器》)
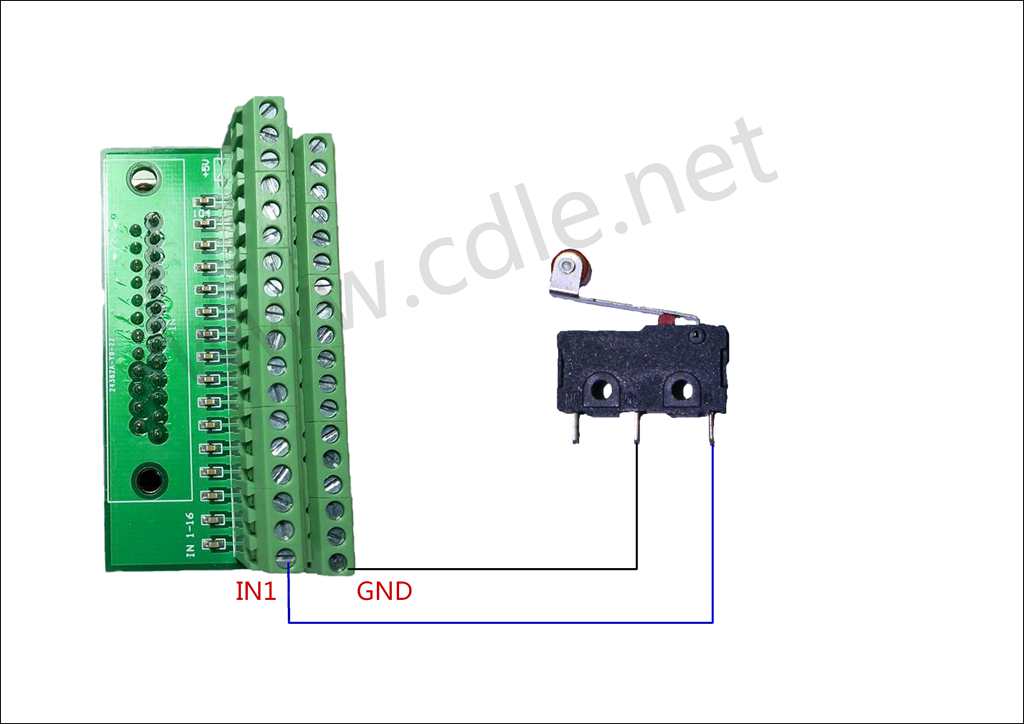
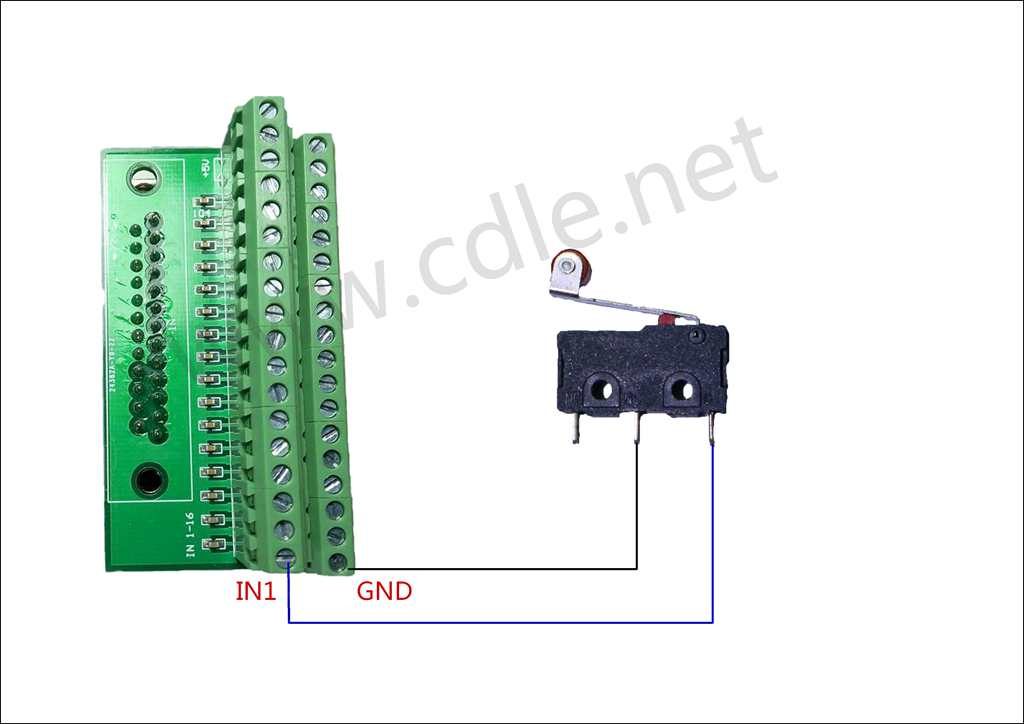
连接机械式开关时,方法最简单,只需要把开关的公共端(C)接入到SCM4脱机控制器的任一个GND端口,以及把常开触点(NO)或常闭触点(NC)接入到SM4脱机控制器的IN1-16中的任一个端口上。建议使用时连接到常闭触点上,可以增加抗干扰性。另处普通的对刀器原理类似于机械式开关,接线方式按照机械式开关接法。
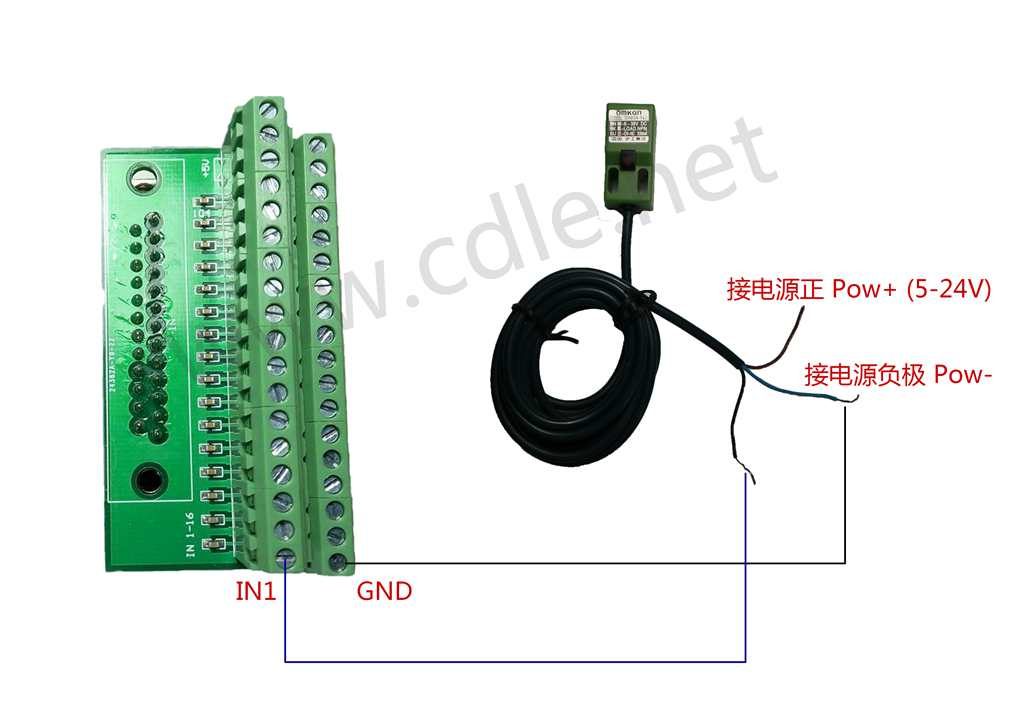
连接NPN型传感器时,需要把传感器电源正端连接到电源正端,可以是独立电源也可以和SMC4四轴控制器共用电源,电压不得高于24V,传感器电源负端连接到电源负端,传感器输出端连接到SM4脱机控制器的IN1-16中的任一个端口上。NPN型传感器输出类型可以是常开也可以是常闭的。
测试方法
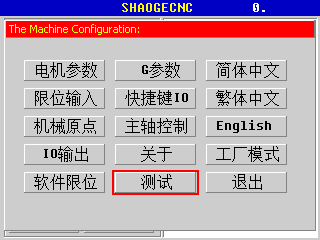
SMC4四轴控制器内置输入端口测试界面。可从菜单“机台配置”-“测试”中打开。进入测试界面后,可以利用界面中的显示图形来测试开关、线路以及端口的好坏。图形为红色时表示输出端口INx与GND呈开路状态,图形为黑色时表示输出端口INx与GND呈闭合状态。测试方法可以看下面的视频。

测试界面的使用方法视频
下面以假设接入一个急停(常闭)IN1、 一个X轴+限位(常闭)IN2、一个Y原点(常闭)IN3以及一个对刀器(常开)IN4 ,来看看应如何设置。
急停(常闭)IN1
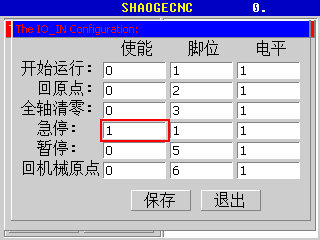
这个例子中急停开关为常闭,接于IN1。
使能:该项设置为1时,此项目生效,设置为0时,此项目失效。
脚位:功能开关所连接的端口号。
电平:接成常开,设电平为0。
接成常闭,设电平为1。
*2023年11月后的固件版本,快捷IO设置中的电平设置有所更改,统一成接成常开,设电平为1。接成常闭,设电平为0。
X轴+限位(常闭)IN2

这个例子中X轴限位+开关为常闭,接于IN2。
使能:该项设置为1时,此项目生效,设置为0时,此项目失效。
脚位:限位开关所连接的端口号。
电平:接成常开,设电平为1。
接成常闭,设电平为0。
Y原点(常闭)IN3

这个例子中Y轴机械原点开关为常闭,接于IN3。
使能:该项设置为1时,此项目生效,设置为0时,此项目失效。
脚位:机械原点开关所连接的端口号。
电平:接成常开,设电平为1。
接成常闭,设电平为0。
方向:可设置为0或1,分别表示为运动轴的正反向,按实际情况设定。
对刀器(常开)IN4

这个例子中对刀器开关为常开,接于IN4。
使能:该项设置为1时,此项目生效,设置为0时,此项目失效。
脚位:对刀器开关所连接的端口号。
电平:接成常开,设电平为1。
接成常闭,设电平为0。
方向:可设置为0或1,分别表示为运动轴的正反向,按实际情况设定。
对刀器的其它设置项可以在“G参数”中设置。

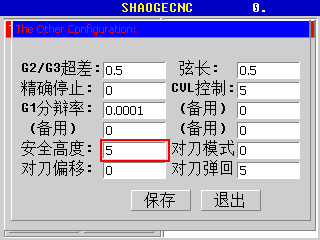
安全高度:暂停/回原点/加参考点时Z轴会按这个设定值抬高。
对刀模式:默认值0,为浮动对刀。值为1时是固定对刀,有第一次对刀和换刀后对刀两种操作。
对刀偏移:对刀后,Z轴坐标会偏置到这个值上。这个值通常会设置成对刀块厚度。
对刀弹回:对刀后,Z轴会按照这个设置值离开对刀器,方便拿走对刀器。
在程序中也是可以用M指令对输入端口应该侦测的。使用M3xx可以判断端口是否为低电平(常开开关触发时相当于低电平),如果是则向下执行下一行,否侧一直等待。使用M4xx可以判断端口是否为高电平(常闭开关触发时相当于高电平),如果是则向下执行下一行,否侧一直等待。xx则代表01-16号IN端口,比如要判断IN1是否为低电平,就可以在程序中使用M301来判断。实例应用可以参考《SMC4脱机控制器单步运行》