
如果手头上没有热风枪、吸锡带、吸锡枪等工具,要想拆除更换多引脚的芯片会比较麻烦,下面介绍一个国外爱好者发表的简易方法。
图片来源于互联网。

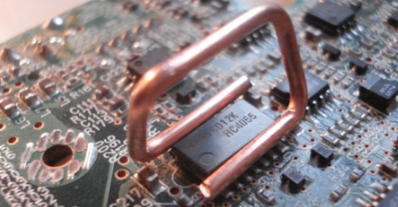
找一根较粗的铜导线。

用钳子把铜线弯成合适的形状,

向铜线上焊上一些焊锡。
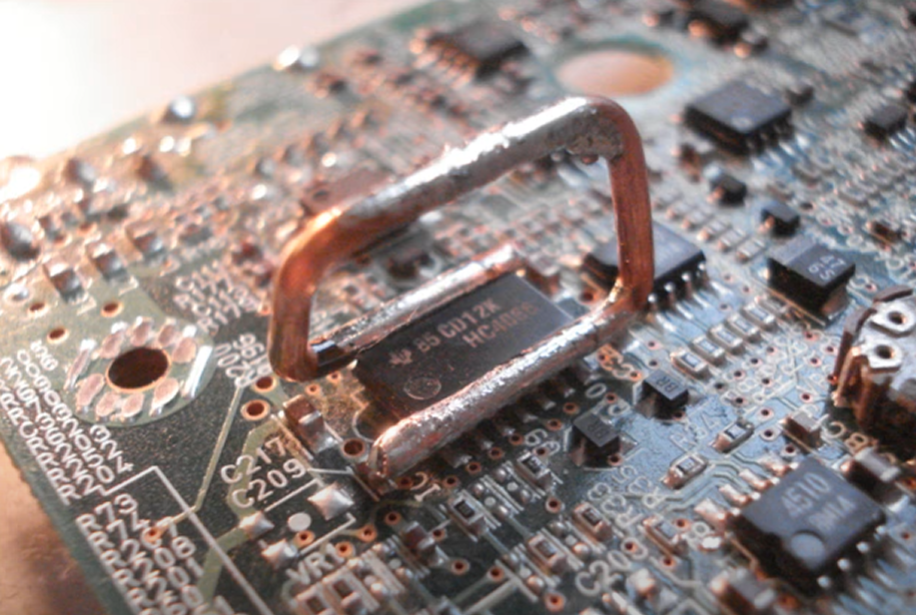
把铜线焊接在要拆除的芯片上。
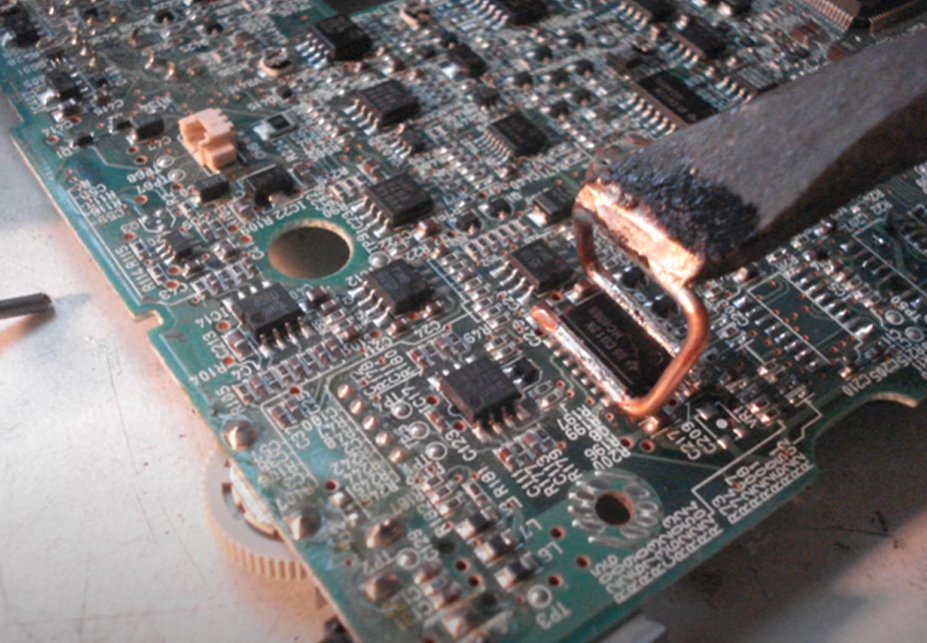
给铜线加热到化锡。

趁焊锡还在熔化状态时,快速的使用镊子把芯片从PCB上夹起来。
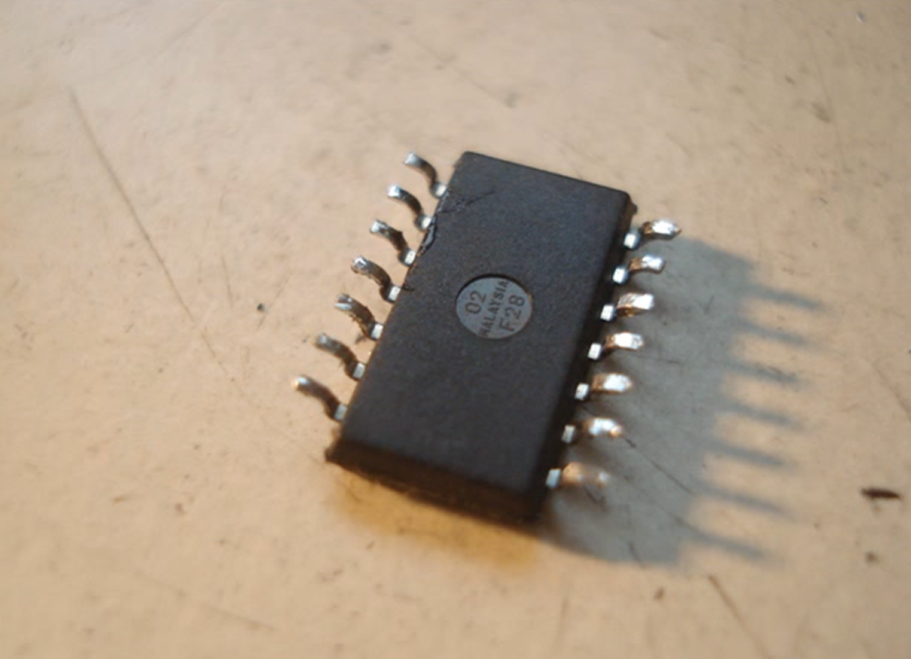
这个方法拆除的芯片可以很完整。
PCB也很完整。

用这个方法可以适合不同形状、大小的芯片或其它贴片元件。
如果手头上没有热风枪、吸锡带、吸锡枪等工具,要想拆除更换多引脚的芯片会比较麻烦,下面介绍一个国外爱好者发表的简易方法。
图片来源于互联网。
找一根较粗的铜导线。
用钳子把铜线弯成合适的形状,
向铜线上焊上一些焊锡。
把铜线焊接在要拆除的芯片上。
给铜线加热到化锡。
趁焊锡还在熔化状态时,快速的使用镊子把芯片从PCB上夹起来。
这个方法拆除的芯片可以很完整。
PCB也很完整。
用这个方法可以适合不同形状、大小的芯片或其它贴片元件。
想要查看室内或存储空间的温度和湿度,得有个温湿度计,网上一搜很多。选了一款小型圆形的电子数据显示式。外形直径大约45mm,安装尺寸直径大约41mm,使用一个LR44纽扣电池供电,体积小巧,读数直观,无需操作。测试精度不高,温度为±1度,湿度测量精度±5%,完全可以满足日常需要。价格便宜,只需要几元一只。

因这种小型温湿度计是安装模块,没有可放置于桌面的支架,所以想放置于桌子上要自己制作一个支架。用3D打印机打印一个,这就很方便了。
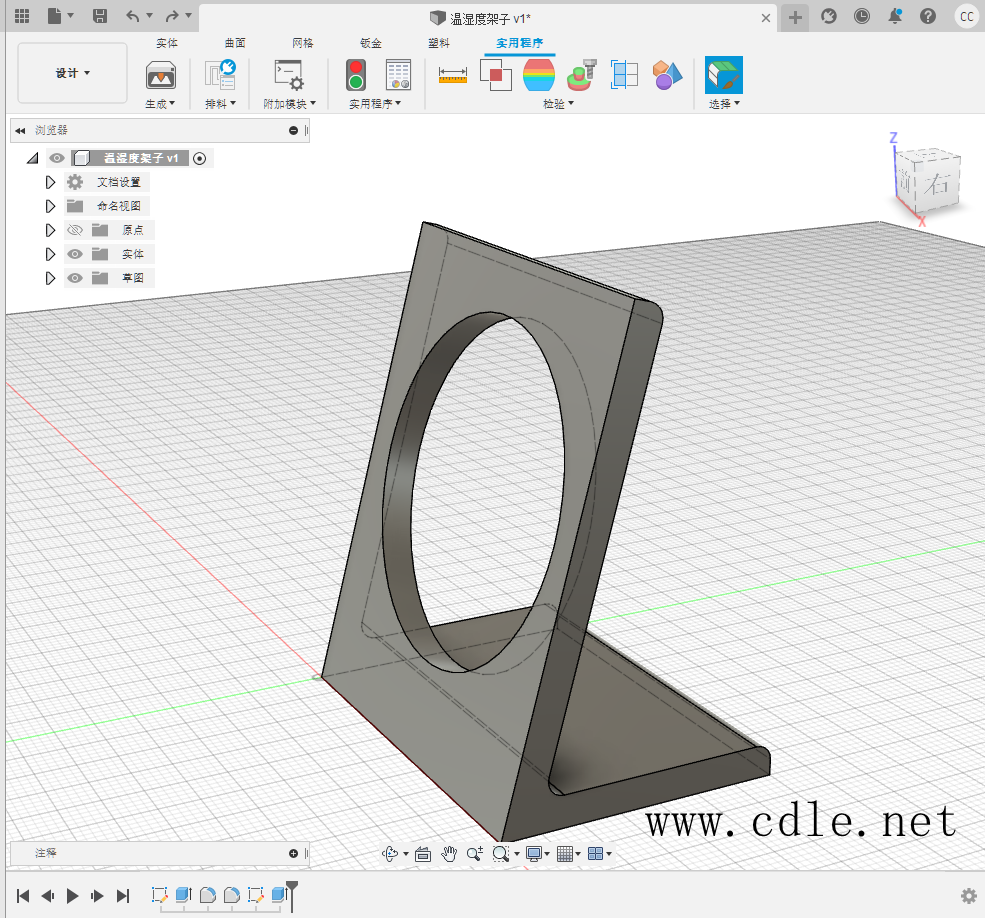
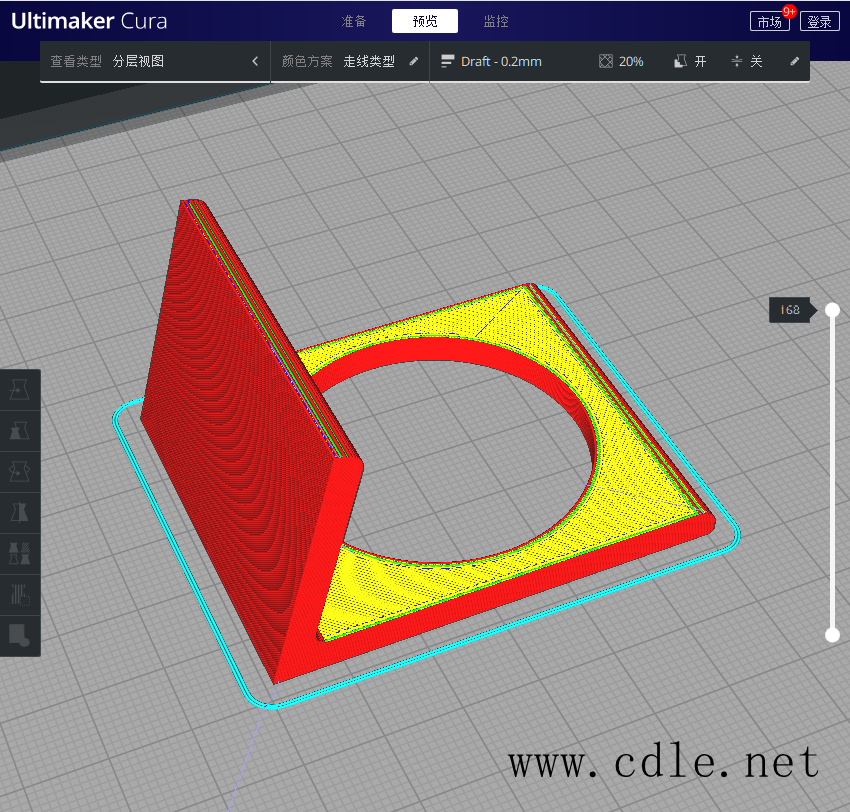
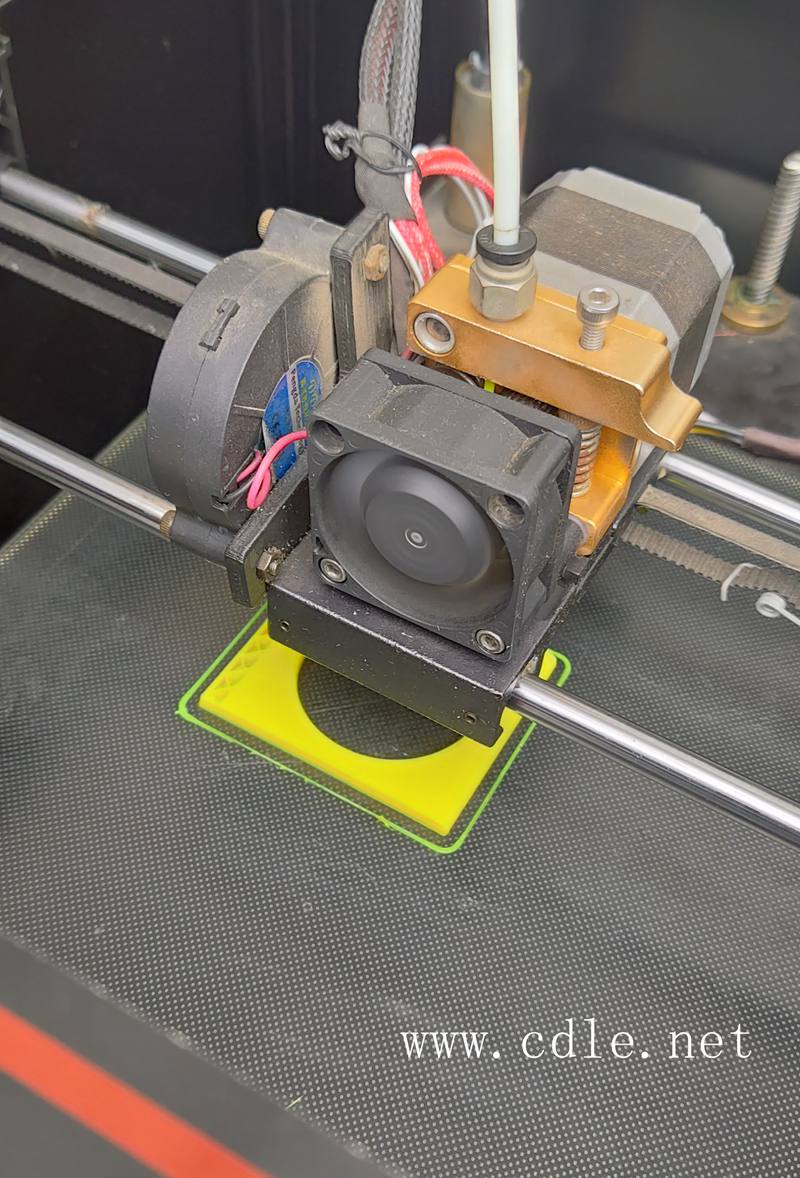
Fusion360建模,Cura切片,打印,搞定。本支架的STL模型文件下载-》点击XT。

同样的制作方式也可以用到3D耗材箱等需要关注温度和湿度的设备或装置中。3D耗材的使用和保存过程中湿度不宜过大,以免影响打印质量、使用寿命。


上面这个经典的简单型晶体测试仪,也同样算是振荡电路的应用。《电路分析1-单电池点亮白光LED》和《电路分析2-555振荡器》中所提及的电路中是使用到RC振荡,而本文则是由晶体、电容取代RC。
在没有晶体加入时,按下S1后接通电源,Q1通过基级偏置R1和发射级偏置R2,使得Q1的基级和发射级稳定在设定的电压,根据计算基级电压约为8V,发射级电压约为7.2V,因有电容C2、C3的作用,这两处的电压会有个上升过程才会到达 8V和7.2V,上升过程的长短取决于C2、C3的容量。Q1发射级电压在上电初期虽有上升过程,但经过C4隔直后,再经过D1、D2后,也无法为C5充电到0.7V让Q2开启。所以电路在没有晶体的加入时,或者是加入的晶体是损坏无法工作的,LED1是无法点亮的。
电路中加入能正常工作的晶体时,晶体和Q1、C2、C3、R1、R2组成振荡电路,按下S1接通电源后,Q1发射级电压则不再是稳定的7.2V,而是一个波动的电压,具体的波动幅度、频率会取决于振荡电路的各元件的参数值。因Q1发射级电压波动,通过C4耦合,D1、D2整流后不断地向C5充电,Q2基级电压到达0.7V后导通,点亮LED1,达到检测晶体好坏的目的。
