
朋友发来一套基于TS457电压内阻测量模块的电压内阻仪套件,要求帮忙焊接组装。打开包装一看,带来的塑料盒子是没有开孔的,要自己开孔太麻烦了。除了TS457还有一个锂电充电升压模块、一对开尔文测试夹子、开关、18650电池盒、连接端子和一些其它配件。
该测试仪使用四线测试法,精度对于业余DIY爱好者检查常用的电池来说也是够用了。
电压测试范围:0.001V~45.00V 分辨率0.001V
内阻测量范围:0.1mΩ~6.999Ω 分辨率0.1mΩ
数据记录:支持记录5组内阻测量数据

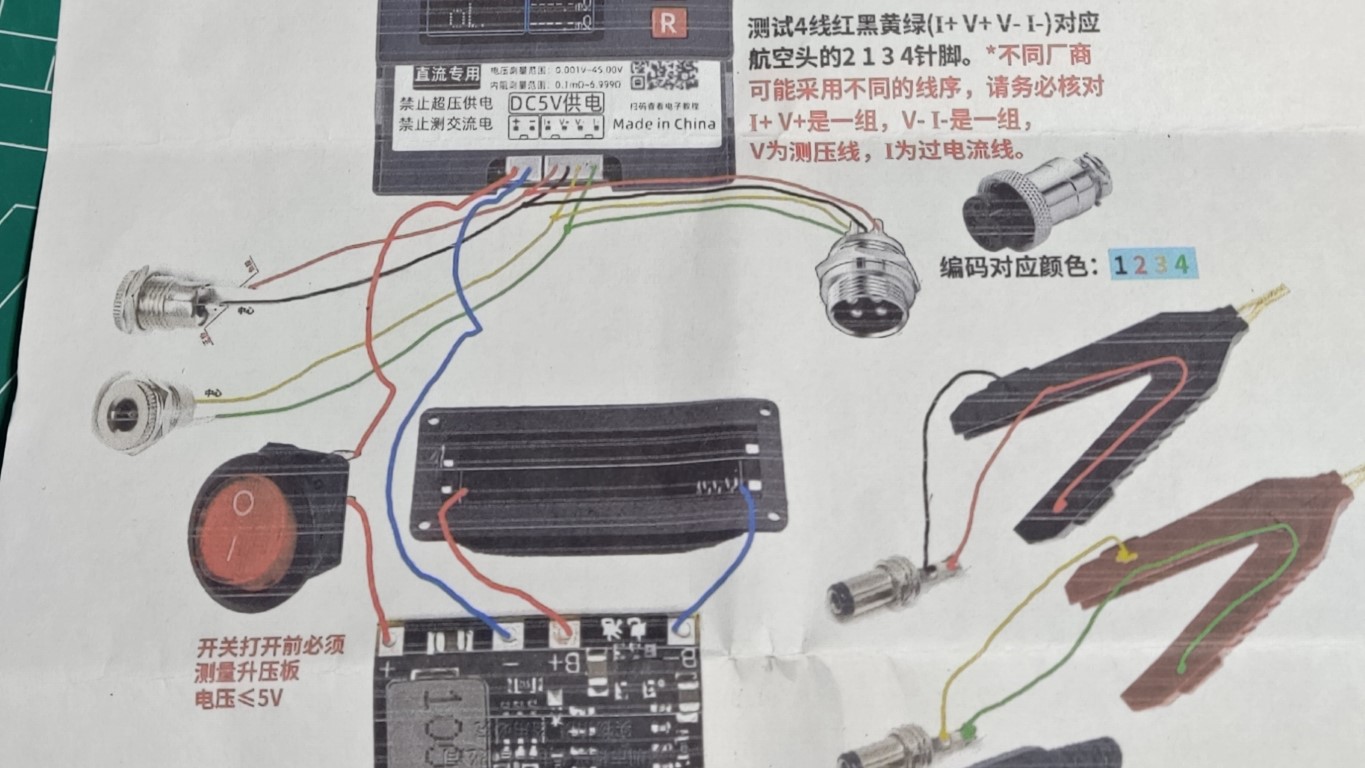
一张附带连接图的说明书,DIY套件也没什么好说的,就那样吧。
用套件的塑料盒子做外壳需要开孔,而且电路小板也不好固定,不如先来画一个简单的外壳模型,再3D打印出来,还更省事。简单整整,形状不复杂,尺寸算好,一次性打印完成。
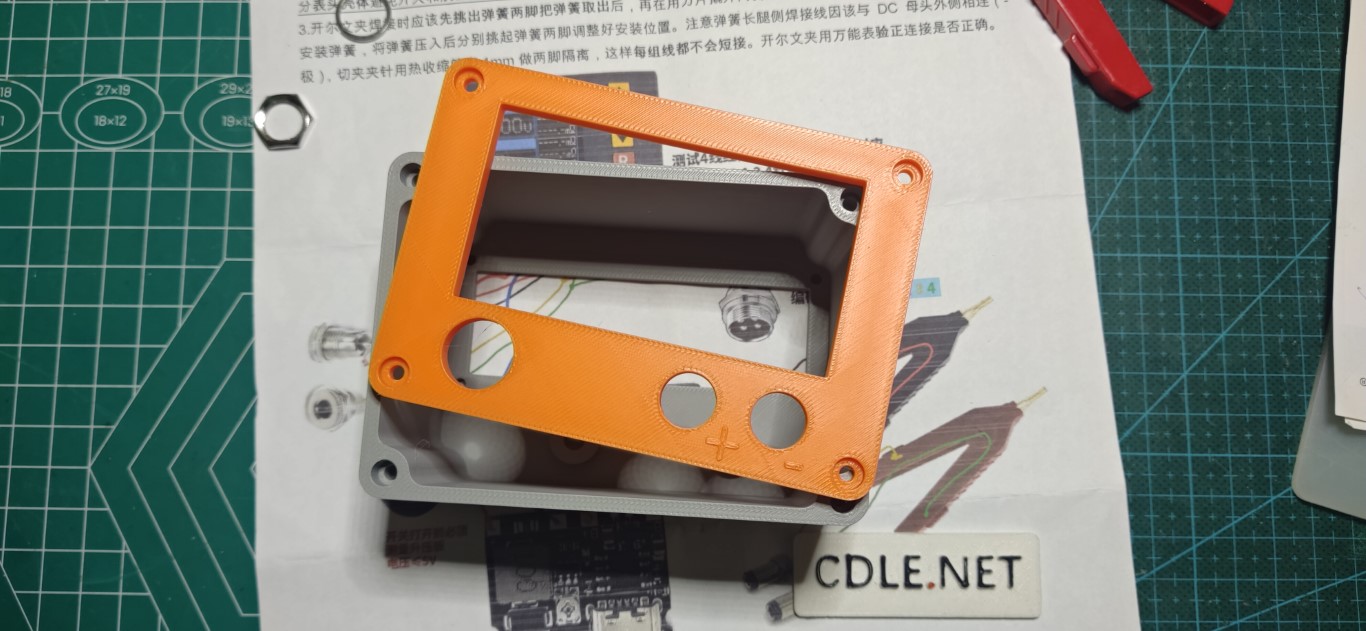
压入热压螺母,方便安装和固定元件。
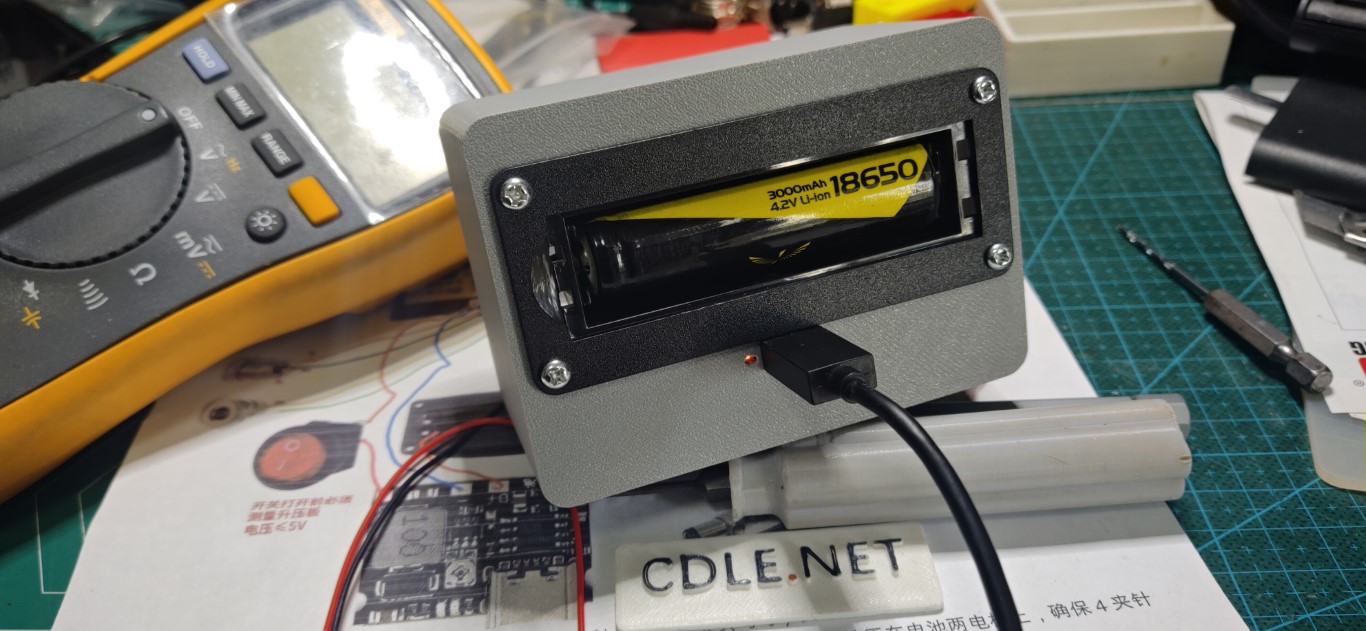
焊接好连接到锂电池充电升压电路板的所有引线,并安装好18650电池盒。
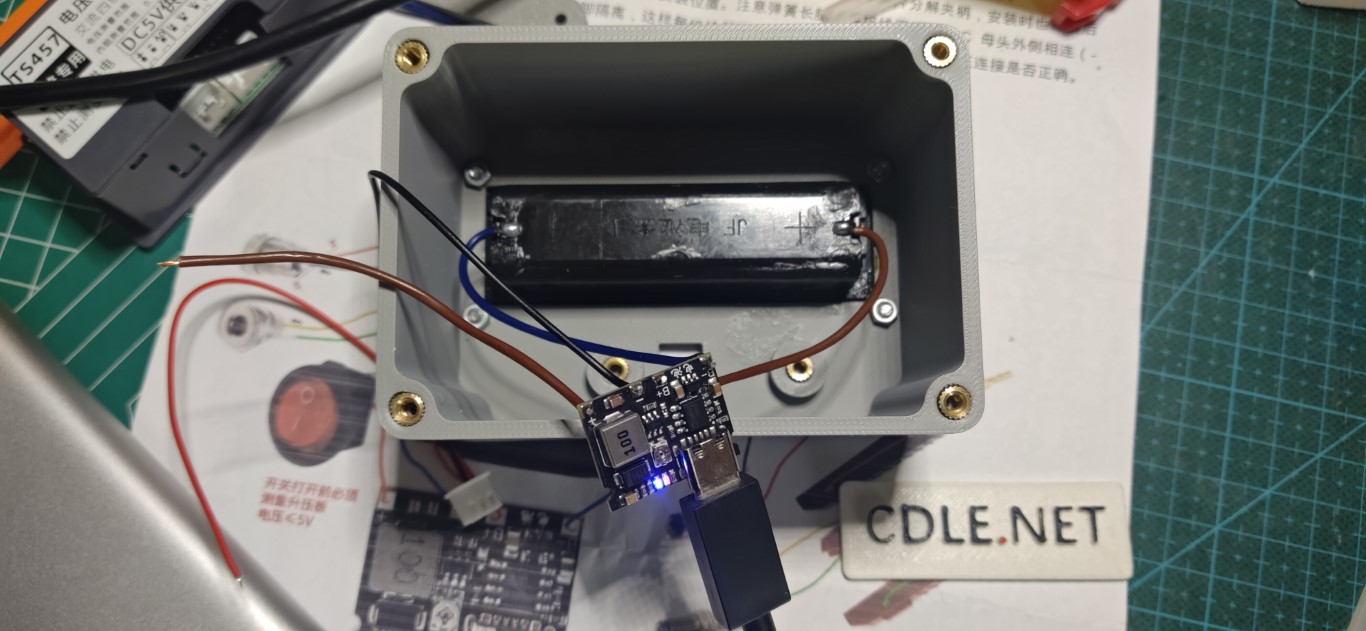
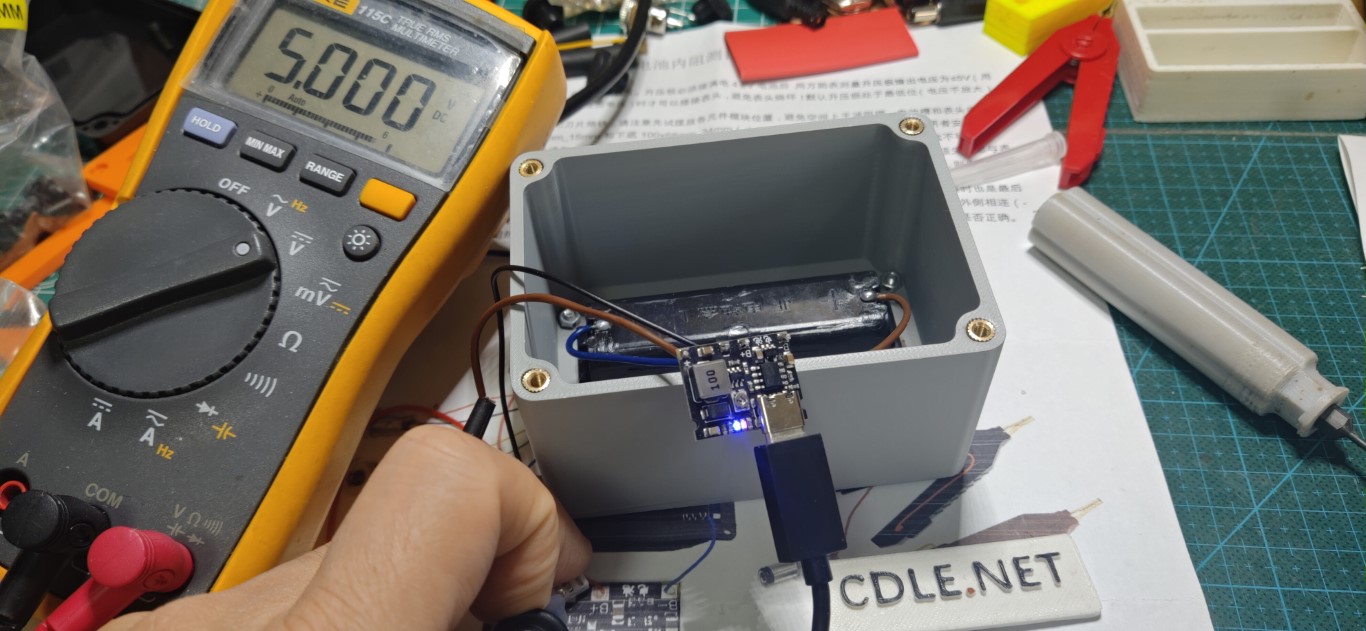
接入USB电源,调节锂电池充电升压电路板的小型可调电位器,把输出电压调节到5V。
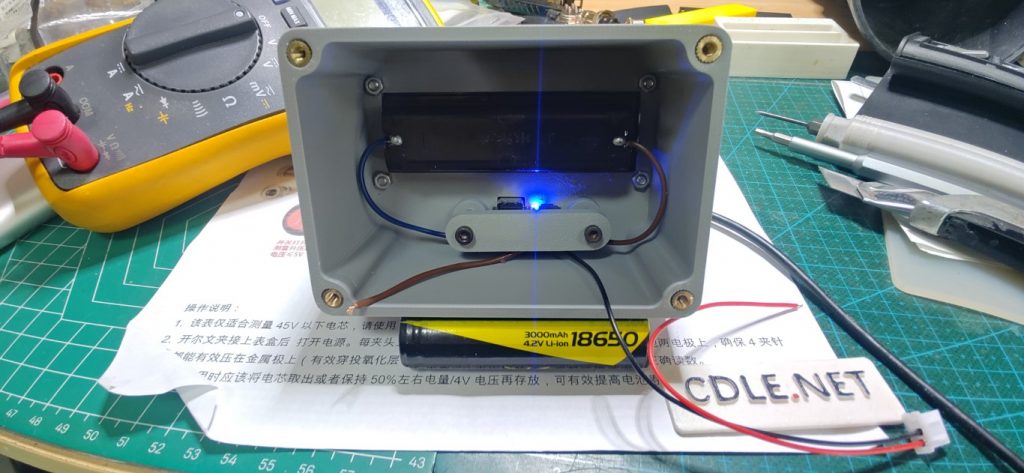
装入电池,检查充电状态红灯是否正常亮起。
把锂电池充电升压电路板用固件件固定好。
下一步就是焊接连线并安装连接端子。
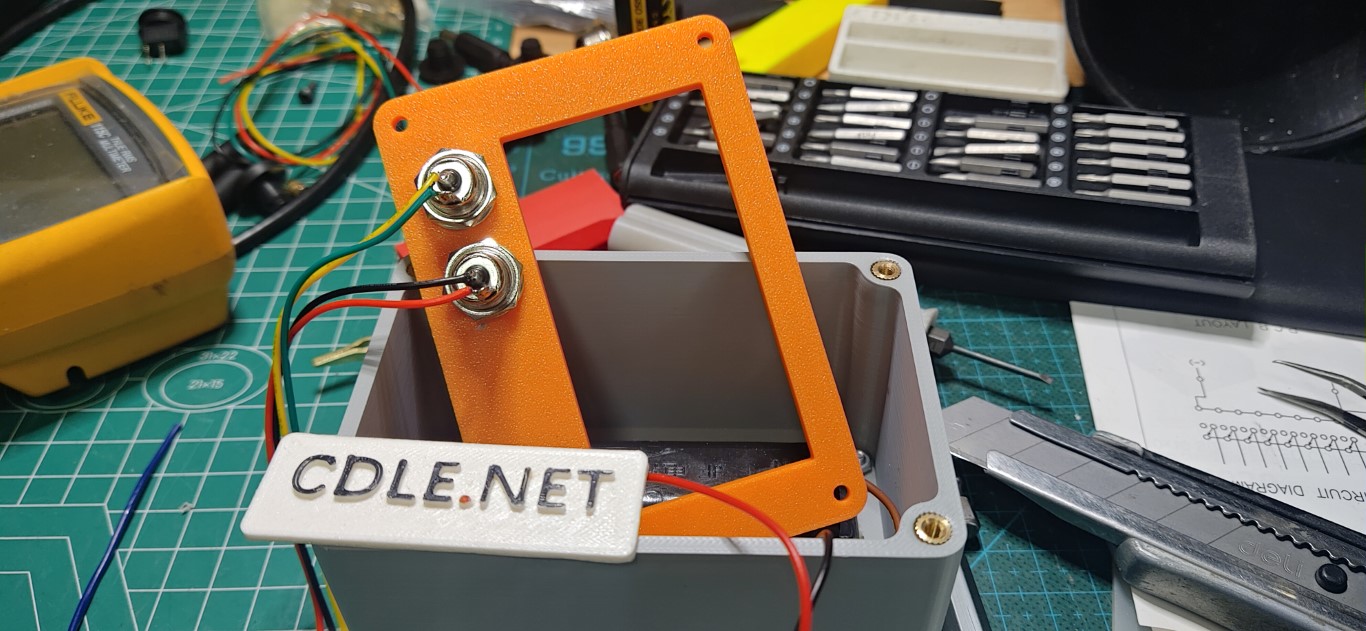
焊接电源开关,并安装好TS457模块。
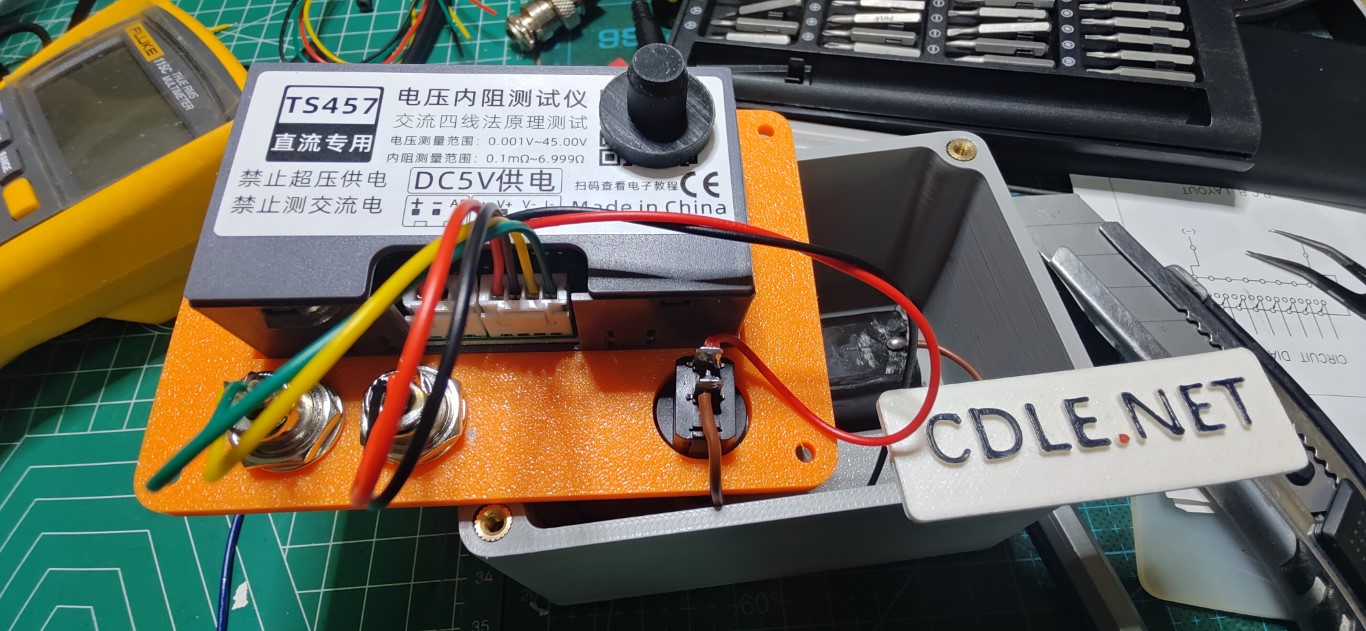
把面板用螺丝固定好,打开电源,正常进入测试界面,基本就算完成了。

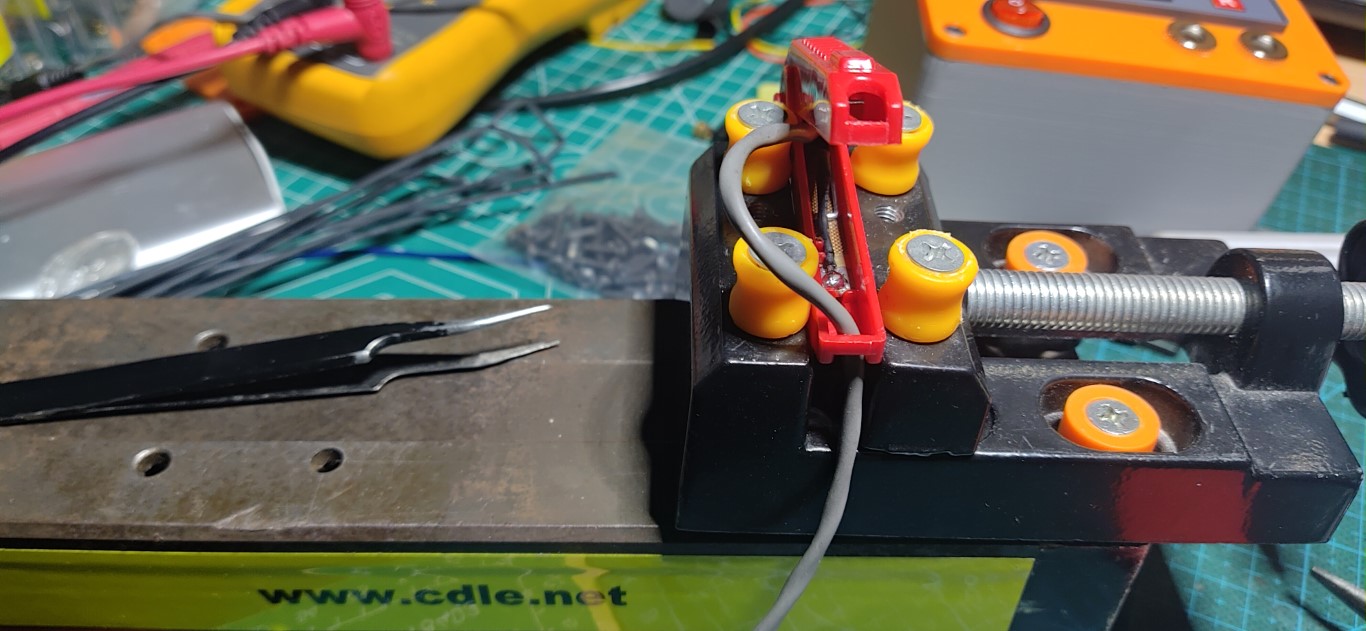
最后就是焊接开尔文测试夹。焊接完成后,可以用万用表测一下是否正常。当夹子合起来时端子中心和外圈是短路状态,张开夹子是断路状态。
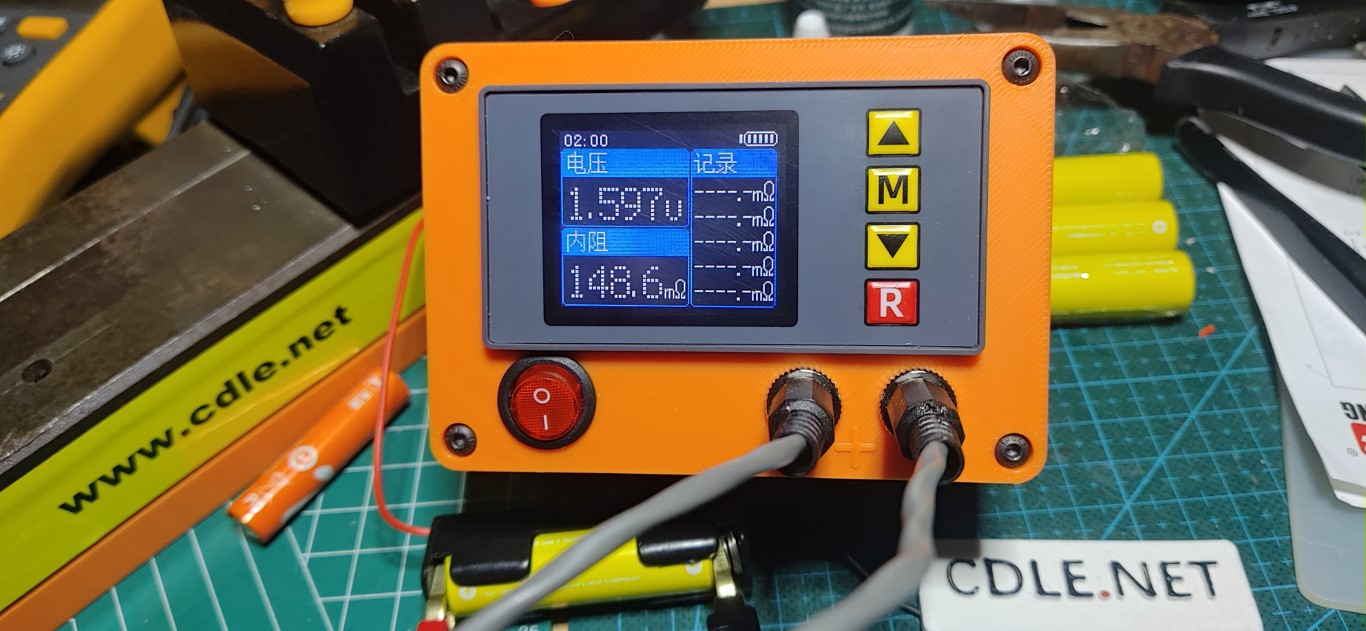
开尔文测试夹连接好内阻仪,短接两只夹子,测试结果如下图。

找来一节5号AA电池,测一下,电压是1.597V,内阻148毫欧,数据符合一般AA电池的参数特征。
下面是简单测试的视频:
20241223
IT8512电子负载接线柱改装,原螺丝接线柱改装成香蕉插接线柱,DIY改装有需要可以联系。
